

Orbitador de Reconocimiento de Marte
Antecedentes
SOS Children, que corre cerca de 200 sos escuelas en el mundo en desarrollo, organizó esta selección. Haga clic aquí para obtener más información sobre SOS Children.
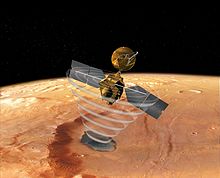
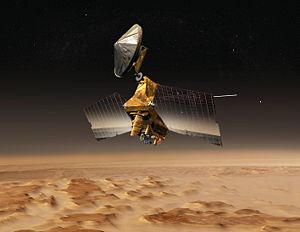 Conceptual imagen que representa el Orbitador de Reconocimiento de Marte en una elíptica órbita de baja planeta alrededor de Marte | |
| Operador | NASA / JPL |
|---|---|
| Los principales contratistas | Lockheed Martin Space Systems Universidad de Arizona Laboratorio de Física Aplicada Agencia Espacial Italiana Malin Space Science Systems, |
| Tipo de Misión | Orbiter |
| Satélite de | Marte |
| Fecha de inserción orbital | 2006-03-10 21:24:00 UTC |
| Órbitas | 93 ° de inclinación a las 3:00 pm significa órbita científica local, solar tiempo heliosíncrona última primaria |
| Fecha de lanzamiento | 2005-08-12 11:43:00 UTC |
| Cohete portador | Atlas V-401 |
| Lugar de lanzamiento | Espacio Complejo de Lanzamiento 41 Estación de la Fuerza Aérea de Cabo Cañaveral |
| Duración de la misión | Misión primaria:> 2 años transcurrido: 7 años, 7 meses y 8 días (2703 soles) |
| COSPAR ID | 2005-029A |
| Página principal | http://marsprogram.jpl.nasa.gov/mro/ |
| Masa | 2,180 kilogramos (4,800 libras) alimentados 1,031 kilogramos (2,270 libras) secos |
| Energía | 2.000,0 W |
| Referencias: | |
Mars Reconnaissance Orbiter (MRO) es una de usos múltiples nave espacial diseñada para llevar a cabo el reconocimiento y exploración de Marte desde la órbita. Los EE.UU. $ 720,000,000 nave fue construida por Lockheed Martin bajo la supervisión de la Jet Propulsion Laboratory. La misión está dirigida por el JPL, en Instituto de Tecnología de California, La Canada Flintridge, California, para la NASA Directorio de Ciencias, Washington, DC Fue lanzado 12 de agosto 2005, y alcanzó la órbita marciana el 10 de marzo de 2006. En noviembre de 2006, después de cinco meses de aerofrenado, que entró en su órbita científica final y comenzó su fase científica primaria. Como MRO entró en órbita se unió a otros cinco naves espaciales activas que sea en órbita o en la superficie del planeta: Mars Global Surveyor, Mars Express, Mars Odyssey, y dos Mars Exploration Rovers ; en el momento un registro de la nave espacial más operativo en las inmediaciones de Marte.
MRO contiene una gran cantidad de instrumentos científicos, tales como cámaras, espectrómetros, y radar , que se utilizan para analizar la accidentes geográficos, estratigrafía, minerales, y hielo de Marte. Allana el camino para futuras naves espaciales mediante el monitoreo diario de Marte clima y condiciones de la superficie, estudiando posibles sitios de alunizaje, y de acogida de un nuevo sistema de telecomunicaciones. Sistema de telecomunicaciones de MRO transferir más datos a la Tierra de todas las misiones interplanetarias anteriores juntos, y MRO servirá como un satélite de retransmisión de alta capacidad para misiones futuras.
Pre lanzamiento

MRO fue una de las dos misiones siendo considerado para el Marte 2003 ventana de lanzamiento; sin embargo, durante el proceso de propuesta del orbitador perdió en contra de lo que se conoció como los Mars Exploration Rovers . La misión del orbitador fue reprogramada para el lanzamiento en 2005, y la NASA anunció su nombre definitivo, Mars Reconnaissance Orbiter, el 26 de octubre de 2000.
MRO es el modelo de la NASA de gran éxito Mars Global Surveyor para llevar a cabo la vigilancia de Marte desde la órbita. Las primeras especificaciones del satélite incluyen una gran cámara para tomar imágenes de alta resolución de Marte. En este sentido, Jim Garvin, científico del programa de exploración de Marte de la NASA, proclamó que MRO sería un "microscopio en órbita". El satélite también debía incluir un espectrógrafo-visible en el infrarrojo cercano.
El 3 de octubre de 2001, la NASA eligió Lockheed Martin como contratista principal para la fabricación de la nave espacial. A finales de 2001 todos los instrumentos de la misión fueron seleccionados. No hubo mayores contratiempos durante la construcción de MRO, y la nave se trasladó a Centro Espacial John F. Kennedy el 1 de mayo de 2005 para prepararlo para su lanzamiento.
Objetivos de la misión
Operaciones científicas MRO se programaron inicialmente para durar dos años de la Tierra, a partir de noviembre de 2006 a noviembre de 2008. Uno de los principales objetivos de la misión es cartografiar el paisaje marciano con sus cámaras de alta resolución con el fin de elegir los sitios de aterrizaje para misiones futuras de la superficie. El MRO jugó un papel importante en la elección del lugar de aterrizaje de la Phoenix Lander , que exploró el Ártico marciano en Valle Verde. El sitio inicial elegido por los científicos fue fotografiada con la Cámara HiRISE y se encontró que ser llenos de cantos rodados. Tras el análisis de HiRISE y la THEMIS un nuevo sitio de Mars Odyssey fue elegido. Marte el laboratorio de ciencias, un rover altamente maniobrable, también tuvo su lugar de aterrizaje inspeccionado. El MRO proporcionó datos críticos de navegación durante sus aterrizajes y actúa como un relé de telecomunicaciones.
MRO está utilizando su equipo científico a bordo para estudiar la Clima marciano, el clima, la atmósfera y la geología, y para buscar signos de agua líquida en los casquetes polares y subterráneo. Además, MRO está buscando los restos de los perdidos previamente Mars Polar Lander y Beagle 2 naves espaciales. Después de sus principales operaciones científicas se han completado, la misión extendida de la sonda es ser el sistema de comunicación y navegación para sondas y sondas rover.
Lanzamiento e inserción orbital

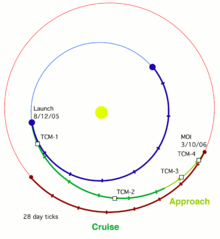
El 12 de agosto de 2005, MRO fue lanzado a bordo de un Atlas V-401 cohetes desde Espacio Complejo de Lanzamiento 41 en Estación de la Fuerza Aérea de Cabo Cañaveral. La Etapa superior Centauro del cohete completó sus quemaduras en un período de cincuenta y seis minutos y se coloca en un MRO órbita de transferencia interplanetaria hacia Marte.
MRO navegó a través del espacio interplanetario por siete meses y medio antes de llegar a Marte. Mientras que en el camino la mayor parte de los instrumentos científicos y experimentos fueron probados y calibrados. Para garantizar la correcta inserción orbital al llegar a Marte, cuatro maniobras de corrección de trayectoria se planificaron y se discutió una quinta maniobra de emergencia. Sin embargo, sólo tres maniobras de corrección de trayectoria eran necesarias, que salvó a 60 libras (27 kg) de combustible que sería utilizable durante la misión extendida de MRO.
MRO comenzó inserción orbital por acercarse a Marte el 10 de marzo de 2006, y pasando por encima de su hemisferio sur a una altitud de 370 a 400 kilómetros (230 a 250 millas). Los seis de los motores principales del MRO quemados durante 27 minutos para reducir la velocidad de la sonda de 2.900 a 1.900 metros por segundo (9.500 a 6.200 pies / s). El depósito de presurización de helio era más fría de lo esperado, lo que redujo la presión en el tanque de combustible en un 21 kilopascales (3,0 psi). La presión reducida causó el motor de empuje a disminuir en un 2%, pero MRO compensa automáticamente al extender el tiempo de grabación por 33 segundos.
La finalización de la inserción orbital coloca el orbitador en una gran órbita polar elíptica con un período de aproximadamente 35,5 horas. Poco después de la inserción, la periapsis - el punto de la órbita más cercano a Marte - era 3.806 kilometros (2.365 millas) desde el centro del planeta (426 kilómetros (265 millas) de su superficie). La apoapsis - el punto de la órbita más alejada de Marte - era 47.972 kilometros (29.808 millas) del centro del planeta (44.500 kilometros (27.700 millas) de su superficie).

El 30 de marzo de 2006, MRO comenzó el proceso de aerofrenado, un procedimiento de tres pasos que reduce a la mitad el combustible necesario para alcanzar una órbita más baja, más circular con un período más corto. En primer lugar, durante sus primeros cinco órbitas del planeta (una semana de la Tierra), MRO utilizar sus propulsores para dejar caer el perigeo de su órbita a una altitud aerofrenado. Esta altura depende del espesor de la ambiente ya que los cambios de la densidad atmosférica de Marte con sus estaciones. En segundo lugar, durante el uso de sus propulsores para hacer correcciones menores a su altitud periapsis, MRO mantiene altitud aerofrenado para 445 órbitas planetarias (unos 5 meses de la Tierra) para reducir el apoapsis de la órbita a 450 kilómetros (280 millas). Esto se hizo de tal manera a fin de no calentar la nave espacial demasiado, pero también lo suficientemente sumergir en la atmósfera para reducir la velocidad de la nave espacial hacia abajo. Después de que el proceso se completa, MRO utilizar sus propulsores para mover su periapsis fuera del borde de la atmósfera de Marte el 30 de agosto de 2006.
En septiembre de 2006 MRO encendió sus propulsores dos veces más para ajustar su órbita final, casi circular de aproximadamente 250 a 316 kilómetros (160 a 196 millas) sobre la superficie marciana. La Antenas de radar Sharad se desplegaron el 16 de septiembre Todos los instrumentos científicos fueron probados y la mayoría se apagaron antes de la conjunción solar que tuvo lugar del 7 de octubre al 6 de noviembre de 2006. Después de la conjunción terminó comenzó la "primera fase científica".
El 17 de noviembre 2006 la NASA anunció la prueba exitosa de la MRO como relé de comunicaciones orbital. Utilizando el rover de la NASA " Espíritu "como el punto de origen de la transmisión, el MRO actuó como un relé para la transmisión de datos a la Tierra.
Eventos y descubrimientos

El 29 de septiembre de 2006 ( Sol 402), MRO tomó su primera imagen de alta resolución de su órbita ciencia. Esta imagen se dice para resolver artículos tan pequeños como 90 cm (3 pies) de diámetro. El 6 de octubre, la NASA lanzó imágenes detalladas de la MRO de Cráter Victoria junto con el Rover Opportunity en el aro por encima de ella. En noviembre, los problemas empezaron a surgir en el funcionamiento de los dos instrumentos de la nave MRO. Un mecanismo paso a paso en el Mars Climate Sounder (MCS) saltó en múltiples ocasiones que resulta en un campo de visión que está un poco fuera de posición. En diciembre las operaciones normales del instrumento se suspendió, aunque una estrategia de mitigación permite que el instrumento para continuar haciendo la mayoría de sus observaciones previstos. Además, un aumento en el ruido y la resultante mala pixeles se ha observado en varios CCDs de la Alta Resolución Experimento Científico de Imágenes (HiRISE). El funcionamiento de esta cámara con un tiempo de calentamiento ha aliviado el problema. Sin embargo, aún se desconoce la causa y puede regresar.
HiRISE continúa devolver imágenes que han permitido descubrimientos sobre la geología de Marte. La primera de ellas es el anuncio de observaciones de terreno en bandas que indican la presencia y la acción del líquido de dióxido de carbono (CO 2) o agua en la superficie de Marte en su reciente pasado geológico. HiRISE fue capaz de fotografiar la sonda Phoenix durante su descenso en paracaídas a Vastitas Borealis El 25 de mayo de 2008 (sol 990).
El orbitador continuó experimentando problemas recurrentes en 2009, incluyendo cuatro reinicios espontáneos, que culminó en un período de cuatro meses de apagado de la nave espacial de agosto a diciembre. Mientras que los ingenieros no han determinado la causa de que se reinicien los recurrentes, que han creado un nuevo software para ayudar a solucionar el problema en caso de que se repita.
El 6 de agosto de 2012 (sol 2483, el orbitador pasó por encima Cráter Gale, el lugar de aterrizaje de la Misión del Laboratorio Científico de Marte, durante su Fase EDL. Se capturó una imagen a través de la cámara HiRISE de la Rover Curiosity descendiendo con su carcasa posterior y el paracaídas supersónico.
Instrumentos
Tres cámaras, dos espectrómetros y un radar están incluidos en el orbitador junto con dos "instrumentos de ciencia de las instalaciones", que utilizan datos de los subsistemas de ingeniería para recopilar datos científicos. Tres experimentos tecnológicos pondrán a prueba y demostrar nuevos equipos para misiones futuras. Se espera MRO obtener alrededor de 5.000 imágenes por año.
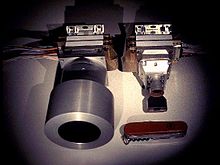
HiRISE (cámara)

La cámara Experimento Científico de Imágenes de Alta Resolución es un 0.5 m telescopio reflector, el más grande jamás llevada en un misión espacio profundo, y tiene una Resolución de 1 de microradián (microrradianes), o 0,3 m desde una altitud de 300 km. En comparación, imágenes satelitales de la Tierra están generalmente disponibles con una resolución de 0,5 m, y las imágenes de satélite en Google Maps están disponibles a 1 m. HiRISE recoge imágenes en tres bandas de color, de 400 a 600 nm (azul-verde o BG), 550 a 850 nm (rojo) y 800 a 1000 nm ( infrarrojo cercano o NIR).
Imágenes en color rojo son 20.264 píxeles de ancho (6 km de ancho), y BG y NIR son 4048 píxeles de ancho (1,2 km de ancho). Ordenador de a bordo del HiRISE lee estas líneas en el tiempo con el orbitador de la velocidad de avance, y las imágenes son potencialmente ilimitado de longitud. Prácticamente sin embargo, su longitud está limitada por el equipo de 28 Gigabit (Gb) capacidad de la memoria, y el tamaño máximo nominal es de 20.000 × 40.000 píxeles (800 megapíxeles) y 4000 × 40.000 píxeles (160 megapíxeles) para BG y NIR imágenes. Cada imagen Gb 16.4 se comprime hasta 5 Gb antes de la transmisión y la liberación al público en general sobre la Sitio web de HiRISE en Formato JPEG 2000. Para facilitar la cartografía de los posibles sitios de alunizaje, HiRISE puede producir pares estéreo de imágenes a partir de la topografía que se puede calcular con una precisión de 0,25 m. HiRISE fue construido por Bola Aerospace & Technologies Corp.
CTX (cámara)
La Cámara Contexto (CTX) ofrece imágenes en escala de grises (500 a 800 nm) con un píxeles de resolución hasta aproximadamente 6 m. CTX está diseñado para proporcionar mapas de contexto para las observaciones específicas de HiRISE y CRISM, y también se utiliza al mosaico grandes áreas de Marte, monitorear una serie de lugares para cambios en el tiempo, y para adquirir equipo de música (3D) la cobertura de las regiones clave y potencial lugares de aterrizaje futuras. La óptica de CTX consisten en un 350 mm longitud focal Maksutov Telescopio Cassegrain con una gama amplia línea 5064 píxeles CCD. El instrumento toma imágenes 30 km (19 millas) de ancho y tiene suficiente memoria interna para almacenar una imagen 160 kilometros de largo antes de cargarlo en el equipo principal . La cámara fue construida y es operada por Malin Space Science Systems. CTX asigna el 50% de Marte antes de febrero de 2010. En 2012 se encontraron los impactos de seis de 55 libras (25 kilogramos) Masas de lastre de entrada Aterrizaje de Marte Laboratorio de Ciencias de Rover Curiosity.
MARCI (cámara)
El Color Imager Marte (MARCI) es un gran angular, relativamente cámara de baja resolución que considera a la superficie de Marte en cinco visible y dos ultravioletas bandas. Cada día, MARCI recoge cerca de 84 imágenes y produce un mapa global con píxeles de resolución de 1 a 10 kilómetros. Este mapa proporciona una informe del tiempo en Marte, ayuda a caracterizar sus variaciones estacionales y anuales, y los mapas de la presencia de vapor de agua y ozono en la atmósfera. La cámara fue construida y es operada por Malin Space Science Systems. Cuenta con un lente ojo de pez de 180 grados con los siete filtros de color unidos directamente un sensor CCD sola.
CRISM (espectrómetro)

El Pacto Espectrómetro de Imágenes de Reconocimiento de Marte (CRISM) es un instrumento visible y infrarrojo cercano ( VNIR) espectrómetro de que se utiliza para producir mapas detallados de la superficie mineralogía de Marte. Opera desde 370 hasta 3920 nm, mide el espectro en 544 canales (cada 6,55 nm de ancho), y tiene una resolución de 18 m (59 pies) a una altitud de 300 km (190 millas). CRISM se utiliza para identificar minerales y productos químicos indicativos de la existencia pasada o presente de agua en la superficie de Marte. Estos materiales incluyen hierro, óxidos, filosilicatos, y carbonatos , que tienen patrones característicos en su energía visible-infrarrojo.
MCS (espectrómetro)
La Mars Climate Sounder (MCS) es un espectrómetro con un canal visible / infrarrojo cercano (0,3 a 3,0 micras) y ocho del infrarrojo lejano (12 a 50 micras) canales. Estos canales se seleccionaron para medir la temperatura, la presión, el vapor de agua y los niveles de polvo. MCS observa la atmósfera en el horizonte de Marte (visto desde MRO) por dividirlo en rebanadas verticales y la toma de medidas dentro de cada rebanada de cada 5 kilómetros (3 millas) incrementa. Estas mediciones se ensamblan en mapas diarios de clima mundial para mostrar las variables básicas del clima marciano: temperatura, presión, humedad y densidad de polvo.
SHARAD (radar)
Shallow Radar subsuperficial (SHARAD) el experimento de MRO está diseñado para investigar la estructura interna de la polar marciano las capas de hielo. También recoge información de todo el planeta sobre las capas subterráneas de hielo , roca y agua posiblemente líquido que podrían ser accesibles desde la superficie. Utiliza SHARAD Ondas de radio de alta frecuencia entre 15 y 25 MHz, una gama que le permite resolver capas tan delgadas como 7 m (23 pies) hasta una profundidad máxima de 1 km (0,6 mi). Tiene una resolución horizontal de 0,3 por 3 km (0,2 a 1,9 millas). SHARAD está diseñado para operar en conjunción con el Mars Express MARSIS, que tiene la resolución más baja, pero penetra a una profundidad mucho mayor. Tanto SHARAD y MARSIS fueron hechas por el Agencia Espacial Italiana.
Instrumentos de ingeniería
Además de su equipo de imagen, MRO lleva una variedad de instrumentos de ingeniería. La Investigación Paquete Gravedad Campo mide las variaciones en el campo gravitatorio de Marte a través de variaciones en la velocidad de la nave. Los cambios de velocidad se detectan midiendo desplazamientos Doppler en las señales de radio de MRO recibidas en la Tierra. El paquete también incluye acelerómetros integrados sensibles utilizados para deducir la densidad atmosférica situ de Marte durante el aerofrenado.
La Electra es una Software de radio UHF definido diseñado para comunicarse con otras naves espaciales cuando se acercan, la tierra, y operar en Marte. Además de protocolo controlado enlaces de datos entre la nave espacial de 1 kbit / s hasta 2 Mbit / s, Electra también ofrece la recolección de datos Doppler, la grabación en bucle abierto y un servicio de sincronización de alta precisión basada en una 5e-13 USO. Información Doppler para acercarse a los vehículos se puede utilizar para la orientación descenso final o el descenso y la trayectoria de aterrizaje recreación. Información Doppler en los vehículos desembarcados también permitirá a los científicos determinar con precisión la localización de superficie de módulos de aterrizaje y vehículos de Marte. Los dos MER nave espacial actualmente en Marte utilizar una radio UHF relé anterior generación que proporciona funciones similares a través del orbitador Mars Odyssey. La radio Electra ha demostrado su funcionalidad, apoyándose información hacia y desde la nave espacial MER, aterrizador Phoenix Mars y Rover Curiosity.
Las imágenes de la cámara de navegación óptica de las lunas marcianas, Fobos y Deimos, contra las estrellas de fondo para determinar con precisión la órbita de MRO. Aunque las imágenes de la luna no es de misión crítica, se incluyó como una prueba de la tecnología de satélites de órbita y aterrizaje de naves espaciales futuras. La cámara de navegación óptica fue probado con éxito en febrero y marzo de 2006. Hay una propuesta para buscar pequeñas lunas, anillos de polvo y viejos orbitadores con él.
Los datos de ingeniería

Estructura
Los trabajadores de Lockheed Martin Space Systems en Denver ensamblado la estructura de la nave espacial y que se adjuntan los instrumentos. Los instrumentos fueron construidos en el Jet Propulsion Laboratory, el Universidad de Arizona Laboratorio Lunar y Planetario en Tucson, Arizona, Universidad Johns Hopkins Laboratorio de Física Aplicada en Laurel, Maryland, el Agencia Espacial Italiana en Roma, y Malin Space Science Systems en San Diego. El costo total de la nave espacial fue $ 720 millones de dólares.
La estructura se compone principalmente de compuestos de carbono y placas de aluminio-alveolada. El titanio tanque de combustible ocupa la mayor parte del volumen y la masa de la nave espacial y proporciona la mayor parte de su integridad estructural. Total de la nave espacial de la masa es inferior a 2.180 kg (4.806 libras) con un unfueled masa seca de menos de 1.031 kg (2.273 libras).
Los sistemas de energía

MRO obtiene toda su energía eléctrica de dos paneles solares, cada uno de los cuales se pueden mover de forma independiente en torno a dos ejes (arriba-abajo, o de rotación izquierda-derecha). Cada panel solar mide 5,35 x 2,53 my tiene 9,5 m 2 (102 ft 2) cubiertas con 3.744 células fotovoltaicas individuales. Su alta eficiencia Las células solares de triple unión son capaces de convertir más de un 26% de la energía del sol directamente en electricidad y se conectan entre sí para producir una potencia total de 32 voltios . En Marte, cada uno de los paneles produce más de 1000 vatios de potencia; en contraste, los paneles generarían 3.000 vatios en una órbita terrestre comparable al estar más cerca del Sol
MRO tiene dos baterías recargables de níquel-hidrógeno utilizadas para alimentar la nave espacial cuando no está frente al sol. Cada batería tiene una capacidad de almacenamiento de energía de 50 amperios-hora (180 Kc). La gama completa de las baterías no puede ser utilizado debido a las limitaciones de voltaje en la nave espacial, pero permite a los operadores para extender la vida de la batería, una valiosa capacidad, dado que la fuga de la batería es una de las causas más comunes de insuficiencia satélite a largo plazo. Los planificadores anticipan que sólo se requerirá el 40% de la capacidad de las baterías durante la vida útil de la nave espacial.
Los sistemas electrónicos
El ordenador principal de MRO es un 133 MHz, 10,4 millones transistor, 32-bit, Procesador RAD750. Este procesador es una versión resistentes a la radiación de una PowerPC 750 o Procesador G3 con una especialmente construido placa base. El RAD750 es un sucesor para el RAD6000. Este procesador puede parecer de poca potencia en comparación con un moderno PC procesador, pero es extremadamente fiable, resistente, y puede funcionar en llamarada solar-asoló el espacio profundo. El software del sistema operativo es VxWorks y tiene protocolos de protección de falla extensas y monitoreo.
Los datos se almacenan en un 160 Gb (20 Módulo GB) de memoria flash que consta de más de 700 chips de memoria, cada uno con un 256 Capacidad Mbit. Esta capacidad de memoria no es realmente grande teniendo en cuenta que la cantidad de datos a ser adquiridos; Por ejemplo, una sola imagen de la cámara HiRISE puede ser tan grande como 28 Gb.
Determinación de actitud
Con el fin de determinar la órbita de la nave espacial y facilitar las maniobras, dieciséis sensores solares - ocho primarias y ocho copias de seguridad - se colocan alrededor de la nave para calibrar solar dirección con respecto al marco de la nave. Dos visores de estrellas, cámaras digitales utilizan para mapear la posición de catalogadas estrellas , proveerá de la NASA, el conocimiento de tres ejes completo de la orientación de la nave y la actitud. Un principal y de respaldo Unidad miniatura Medición Inercial (mimu), proporcionado por Honeywell, mide los cambios en la actitud de la nave espacial, así como cualquier cambio no gravitacionalmente inducidas a su velocidad lineal. Cada mimu es una combinación de tres acelerómetros y tres anillos láser giroscopios. Estos sistemas son de importancia crítica para MRO, ya que debe ser capaz de señalar su cámara a una muy alta precisión con el fin de tomar las imágenes de alta calidad que la misión requiere. También se ha diseñado específicamente para minimizar las vibraciones en la nave espacial, a fin de permitir que sus instrumentos para tomar imágenes sin distorsiones causadas por las vibraciones.
Sistema de telecomunicaciones

El Telecom Subsistema de MRO es el mejor sistema de comunicación digital enviado al espacio profundo hasta ahora y por primera vez el uso de la capacidad de acercarse turbo-códigos. Se compone de un muy grande (3 metros) de la antena, que se utiliza para transmitir datos a través de la Red de Espacio Profundo vía Frecuencias de banda X en 8 GHz, y demuestra el uso de la K una banda a 32 GHz para las tasas de datos más altas. La velocidad máxima de transmisión de Marte se prevé que sea tan alto como 6 Mbit / s, una velocidad diez veces mayor que los orbitadores Mars anteriores. La nave espacial lleva dos de banda X 100 vatios amplificadores (uno de los cuales es una copia de seguridad), uno de 35 vatios K un amplificador -Band, y dos Pequeños transpondedores Deep Space (SDSTs).
Dos antenas de baja ganancia más pequeños también están presentes para la comunicación de tasa más baja durante las emergencias y eventos especiales, como la puesta en marcha y Marte Órbita de inserción. Estas antenas no tienen platos de enfoque y pueden transmitir y recibir desde cualquier dirección. Son un sistema de copia de seguridad importante asegurarse de que MRO siempre se puede llegar, incluso si su antena principal está apuntando lejos de la Tierra.
El K un subsistema -band fue utilizado con fines de demostración. Debido a la falta de espectro a 8,41 GHz de banda X, las futuras misiones de espacio profundo de alta tasa utilizarán 32 GHz K un -band. Red del Espacio Profundo (DSN) implementó un K -band recibir capacidades en los tres de sus complejos (Goldstone, Canberra y Madrid) durante sus 34 m haz de guía de ondas (BWG) Antena subred. Durante la fase de crucero, nave espacial K una telemetría -band fue rastreado 36 veces por estas antenas acrediten funcionalidad en todas las antenas. También se planificaron unas pruebas -BAND K durante la fase de la ciencia, pero durante aerofrenado un interruptor fracasaron, lo que limita la antena de alta ganancia de banda X a un solo amplificador. Si el amplificador no se perderán todas las comunicaciones de banda X de alta velocidad. El K un enlace descendente es la copia de seguridad sólo queda para esta funcionalidad, y puesto que el K una capacidad -band de uno de los transpondedores SDST ya ha fracasado, (y el otro podría tener el mismo problema) JPL decidió detener todos K un -band manifestaciones y mantener la capacidad restante en reserva.
Control de la propulsión y la actitud

La nave espacial utiliza un 1175 L (310 EE.UU. gal) tanque de combustible lleno de 1.187 kg (2,617 libras) de hidracina monopropelente. La presión de combustible se regula mediante la adición de gas helio a presión desde un depósito externo. El setenta por ciento del combustible fue utilizado para la inserción orbital.
MRO tiene veinte propulsores del motor de cohete a bordo. Seis grandes propulsores cada producen 170 N (38 lbf) de empuje para un total de 1020 N (230 lbf) destinado principalmente para la inserción orbital. Estos propulsores fueron diseñados originalmente para el Mars Surveyor 2001 Lander. Seis propulsores medianas producen cada 22 N (5 lbf) de empuje para las maniobras de corrección de trayectoria y control de actitud durante la inserción en órbita. Finalmente, ocho pequeños propulsores cada producen 0,9 N (0,2 lbf) de empuje para el control de actitud durante las operaciones normales.
Cuatro ruedas de reacción también se utilizan para el control de actitud precisa las actividades que requieran una plataforma muy estable, como las imágenes de alta resolución, en la que incluso los pequeños movimientos pueden causar el desenfoque de la imagen. Cada rueda se utiliza para un eje de movimiento. El cuarto (sesgado) rueda es una copia de seguridad en caso de que falle uno de los otros tres ruedas. Cada rueda pesa 10 kg (22 libras) y se puede girar tan rápido como 100 Hz o 6000 rpm.
Descubrimientos y fotografías
El hielo de agua en la capa de hielo mide
Los resultados, publicados en 2009 de las mediciones de radar de la capa de hielo del Polo Norte determinó que el volumen de hielo de agua en la tapa es 821.000 kilómetros cúbicos (197.000 millas cúbicas), equivalentes al 30% de la capa de hielo de Groenlandia de la Tierra.
Hielo expuesto en nuevos cráteres

Un artículo en la revista Science en septiembre de 2009, informó que algunos de los nuevos cráteres en Marte han extraído hielo de agua relativamente pura. Después de la exposición, el hielo se desvanece gradualmente a medida que se sublima de distancia. Se encontró que estos nuevos cráteres y fechados por la cámara CTX, y la identificación de los hielos se confirmó con el Pacto Imaging Spectrometer (CRISM) a bordo de la Mars Reconnaissance Orbiter (MRO). El hielo fue encontrado en un total de 5 lugares. Tres de los lugares están en el Cuadrángulo Cebrenia. Estos lugares son 55.57 ° N 150.62 ° E 43.28 ° N 176.9 ° E y 45 ° N 164.5 ° E Otros dos están en el Diacria cuadrilátero: 46.7 ° N 176.8 ° E y 46.33 ° N 176.9 ° E
Hielo en lobulados escombros delantales

Resultados de radar desde SHARAD sugirió que las características denominan Delantales Escombros lobulados (ADL) contienen grandes cantidades de hielo de agua. De interés por parte de los días de la Vikingo Orbiter, estos LDA son delantales de acantilados de material circundante. Tienen una topografía convexa y una pendiente suave; esto sugiere fluya lejos de la fuente acantilado escarpado. Además, escombros lobulados delantales pueden mostrar alineaciones superficie igual de glaciares de roca en la Tierra. SHARAD ha proporcionado pruebas sólidas de que las agencias de desarrollo local en Hellas Planitia son glaciares que están cubiertos con una fina capa de escombros (es decir, rocas y polvo); Se observó una fuerte reflexión de la parte superior y la base de LDAs, lo que sugiere que el hielo de agua pura constituye la mayor parte de la formación (entre las dos reflexiones). Sobre la base de los experimentos de la sonda Phoenix y los estudios de la Odisea Marte desde la órbita, es conocido el hielo de agua que existe bajo la superficie de Marte en las latitudes altas () lejos al norte y sur.
Depósitos de cloruro
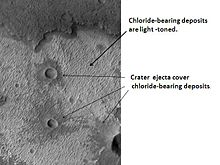
Utilizando datos de la Mars Global Surveyor, Mars Odyssey y Mars Reconnaissance Orbiter de la, los científicos han encontrado extensos depósitos de minerales de cloruro. La evidencia sugiere que los depósitos se forman a partir de la evaporación de las aguas minerales enriquecido. La investigación sugiere que los lagos se pueden esparcir en grandes áreas de la superficie marciana. Por lo general, los cloruros son los últimos minerales para salir de la solución. Carbonatos, sulfatos, y sílice deben precipitarse por delante de ellos. Sulfatos y sílice han sido encontrados por los Mars Rovers en la superficie. Lugares con minerales de cloruro puede haber una vez ocupado diferentes formas de vida. Además, estas áreas pueden preservar las huellas de la vida antigua.
Otros minerales acuosos
En 2009, un grupo de científicos del equipo CRISM informó sobre 9 a 10 diferentes clases de minerales formados en presencia de agua. Los diferentes tipos de arcillas se encontraron (también llamados filosilicatos) en muchos lugares. Los physilicates identificadas incluyeron esmectita de aluminio de esmectita, hierro / magnesio, caolinita, prehnite, y clorito. Las rocas que contienen carbonato se encuentran en todo el Isidis cuenca. Los carbonatos pertenecen a una clase en la que la vida podría haberse desarrollado. Las áreas alrededor Valles Marineris se encontró que contienen hidratado sílice y sulfatos hidratados. Los investigadores identificaron sulfatos hidratados y minerales férricos en Terra Meridiani y en Valles Marineris. Otros minerales que se encuentran en Marte eran jarosita, alunita, hematita, ópalo, y yeso . Dos a cinco de las clases de minerales se formaron con la derecha pH y agua suficiente para permitir la vida crezca.
Avalanchas
Los Mars Reconnaissance Orbiter CTX y HiRISE cámaras han fotografiado una serie de avalanchas de las escarpas del casquete polar norte, ya que se estaban produciendo.

Avalancha marciana y escombros caídas (HiRISE 2008)

Una foto con escala demuestra el tamaño de la avalancha.
Otras naves

Imagen de Phoenix de aterrizaje en Marte, visto por HiRISE. Aunque en la imagen parece estar descendiendo en el cráter, Phoenix aterrizó en realidad a 20 km de ella.

La sonda Phoenix y su escudo térmico como vistos por HiRISE.

Pistas del rover Oportunidad, como se ve por HiRISE. Los puntos blancos son lugares donde el rover se detuvo para realizar observaciones científicas o torneadas.

Oportunidad visto por HiRISE el 29 de enero de 2009. La oportunidad está en camino de Cráter Endeavour, a 17 km de distancia en este punto.
La Rover Curiosity durante la entrada atmosférica visto por HiRISE el 6 de agosto de 2012. paracaídas supersónico y carcasa trasera visible.
Corrientes de agua salada
El 4 de agosto de 2011 (sol 2125), la NASA anunció que MRO detectado lo que parece ser que fluye el agua salada en la superficie o subsuelo de Marte.