


La mécanique classique
Renseignements généraux
SOS croit que l'éducation donne une meilleure chance dans la vie des enfants dans le monde en développement aussi. Cliquez ici pour plus d'informations sur les enfants SOS.
| La mécanique classique |
|---|
|
Branches
|
Formulations
|
Concepts fondamentaux
|
Les sujets fondamentaux
|
Un mouvement de rotation
|
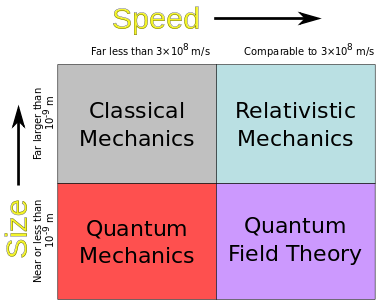
Dans la physique , la mécanique classique est l'un des deux principaux sous-domaines de mécanique, qui est concerné par l'ensemble des lois physiques décrivant le mouvement des organismes sous l'action d'un système de forces. L'étude du mouvement des corps est ancienne, faisant une mécanique classique des sujets les plus âgés et les plus grands dans la science , l'ingénierie et la technologie .
La mécanique classique décrit le mouvement de objets macroscopiques, de projectiles à des parties de machines, ainsi que objets astronomiques tels que engins spatiaux, planètes , étoiles et galaxies . En outre, de nombreuses spécialisations dans le sujet traitent de gaz , liquides , solides , et d'autres sous-thèmes spécifiques. La mécanique classique fournit des résultats extrêmement précis tant que le domaine de l'étude se limite aux objets de grande taille et les délais impliqués ne pas se approcher de la vitesse de la lumière . Lorsque les objets étant traitées devenir suffisamment petit, il devient nécessaire d'introduire l'autre sous-principal domaine de la mécanique, la mécanique quantique , qui concilie les lois macroscopiques de la physique avec le nature atomique de la matière et se occupe de la dualité onde-particule d' atomes et molécules . Dans le cas de haute vitesse objets qui se approchent de la vitesse de la lumière, de la mécanique classique est renforcée par la relativité restreinte . La relativité générale unifie avec la relativité restreinte La loi de Newton de la gravitation universelle, permettant aux physiciens de gérer la gravitation à un niveau plus profond.
La mécanique classique de terme a été inventé au début du 20ème siècle pour décrire le système de la physique commencée par Isaac Newton et beaucoup contemporaine 17ème siècle philosophes de la nature, se appuyant sur les théories astronomiques antérieures de Johannes Kepler , qui à son tour a été basée sur les observations précises de Tycho Brahe et les études de terrestre mouvement d'un projectile de Galileo . Étant donné que ces aspects de la physique ont été élaborés bien avant l'émergence de la physique quantique et de la relativité, certaines sources excluent d'Einstein de la théorie de la relativité de cette catégorie. Cependant, un certain nombre de sources modernes ne comprennent mécanique relativiste, qui, selon eux représente la mécanique classique dans sa forme la plus développée et la plus précise.
La première étape dans le développement de la mécanique classique est souvent appelé à la mécanique newtonienne comme, et est associée à des concepts physiques employées par et les méthodes mathématiques inventés par Newton lui-même, en parallèle avec Leibniz , et autres. Ceci est décrit plus en détail dans les sections suivantes. Plus tard, des méthodes plus abstraites et générales ont été développés, conduisant à des reformulations de la mécanique classique connu sous le nom Équations de Lagrange et Mécanique hamiltonienne. Ces avancées ont été largement réalisés dans les 18e et 19e siècles, et ils se étendent bien au-delà des travaux de Newton, en particulier grâce à l'utilisation des mécanique analytique. En fin de compte, les mathématiques développés pour ces étaient au centre de la création de la mécanique quantique.
Histoire
Certains Philosophes grecs de l'antiquité, parmi lesquels Aristote , fondateur de La physique aristotélicienne, peut avoir été la première à maintenir l'idée que «tout arrive pour une raison» et que les principes théoriques peuvent aider à la compréhension de la nature. Alors que le lecteur moderne, beaucoup de ces idées conservés sortirai comme éminemment raisonnable, il ya un manque flagrant de fois mathématique théorie et contrôlée expérimenter, comme nous le savons. Ces tournées à la fois sur des facteurs décisifs dans la formation de la science moderne, et ils ont commencé avec la mécanique classique.
La «science de poids" médiévale (c.-à-mécanique) doit beaucoup de son importance pour le travail de Jordanus Nemorarius. Dans le Elementa ponderum super-demonstrationem, il introduit la notion de "position gravité "et l'utilisation de composants forces .
Le premier publié explication causale des mouvements des planètes était Johannes Kepler Astronomia nova publié en 1609. Il a conclu, sur la base Les observations de Tycho Brahe de l'orbite de Mars , que les orbites étaient ellipses. Cette rupture avec la pensée antique qui se passait dans le même temps que Galileo a été propose lois mathématiques abstraites pour le mouvement des objets. Il peut (ou non) ont effectué la célèbre expérience de décrocher deux boulets de canon de différents poids de la tour de Pise , montrant que les deux touchent le sol en même temps. La réalité de cette expérience est contestée, mais, plus important encore, il n'a réaliser des expériences quantitatives par des billes de roulement sur une surface inclinée. Sa théorie de mouvement accéléré proviennent des résultats de ces expériences, et constitue une pierre angulaire de la mécanique classique.
Comme base de ses principes de la philosophie naturelle, Isaac Newton a proposé trois lois du mouvement : la loi d'inertie , son deuxième loi d'accélération (mentionné ci-dessus), et le droit de action et de réaction; et donc jeté les bases de la mécanique classique. Les deux deuxième et troisième lois de Newton ont reçu un traitement scientifique et mathématique approprié dans Newton Philosophiae Naturalis Principia Mathematica, qui les distingue des tentatives antérieures à expliquer des phénomènes similaires, qui étaient soit incomplètes, inexactes ou accordé peu d'expression mathématique précise. Newton a également énoncé les principes de conservation de l'impulsion et de moment angulaire . En mécanique, Newton était aussi la première à fournir la première formulation scientifique et mathématique correcte de gravité dans La loi de Newton de la gravitation universelle. La combinaison des lois de Newton sur le mouvement et la gravitation fournir la description la plus complète et la plus précise de la mécanique classique. Il a démontré que ces lois se appliquent aux objets du quotidien ainsi que des objets célestes. En particulier, il a obtenu une explication théorique des lois de Kepler du mouvement des planètes.
Newton précédemment inventé le calcul , des mathématiques, et l'a utilisé pour effectuer les calculs mathématiques. Pour l'acceptabilité, son livre, le Principia , a été formulée entièrement en termes de méthodes géométriques établies de longue date, qui ont été rapidement éclipsé par son calcul. Cependant, il était Leibniz qui a développé la notation du dérivé et intégrante aujourd'hui préféré.

Newton, et la plupart de ses contemporains, à l'exception notable des Huygens, ont travaillé sur l'hypothèse que la mécanique classique serait en mesure d'expliquer tous les phénomènes, y compris la lumière , sous la forme de optique géométrique. Même si la découverte de la soi-disant Les anneaux de Newton (un des interférences d'ondes phénomène) son explication est resté avec sa propre la théorie corpusculaire de la lumière.
Après Newton, la mécanique classique est devenu un champ d'étude principal en mathématiques ainsi que la physique. Après Newton, plusieurs re-formulations autorisés progressivement trouver des solutions à un plus grand nombre de problèmes. La première reformulation notable a été en 1788 par Joseph Louis Lagrange . Équations de Lagrange a été à son tour reformulés en 1833 par William Rowan Hamilton.
Quelques difficultés ont été découverts à la fin du 19ème siècle qui ne pouvait être résolu par plus physique moderne. Certaines de ces difficultés liées à la compatibilité avec la théorie électromagnétique , et le célèbre Expérience de Michelson-Morley. La résolution de ces problèmes conduit à la théorie de la relativité , souvent inclus dans la mécanique classique terme.
Une deuxième série de difficultés étaient liées à la thermodynamique. Lorsqu'il est combiné avec la thermodynamique , la mécanique classique conduit à la Gibbs paradoxe de classiques de la mécanique statistique , dans laquelle l'entropie ne est pas une quantité bien définie. Rayonnement du corps noir n'a pas été expliquée sans l'introduction de quanta. Comme expériences ont atteint le niveau atomique, la mécanique classique ne ont pas réussi à expliquer, même approximativement, ces choses de base comme le les niveaux et les tailles de l'énergie des atomes et la effet photoélectrique. L'effort à résoudre ces problèmes a conduit au développement de la mécanique quantique .
Depuis la fin du 20e siècle, le lieu de la mécanique classique à la physique a été plus que d'une théorie indépendante. Au lieu de cela, la mécanique classique est maintenant considéré comme une théorie approximative à la mécanique quantique plus généraux. L'accent se est déplacé pour comprendre les forces fondamentales de la nature comme dans le modèle standard et ses extensions les plus modernes dans un unifiée théorie du tout. La mécanique classique est une théorie pour l'étude de la motion de particules mécanique, faible consommation d'énergie non-quantiques dans de faibles champs gravitationnels. Dans la mécanique classique du 21e siècle a été étendue dans le domaine complexe et la mécanique classique complexes présente des comportements très similaires à la mécanique quantique.
Description de la théorie
Le tableau suivant présente les concepts de base de la mécanique classique. Par souci de simplicité, il souvent des modèles objets du monde réel que particules ponctuelles, les objets avec taille négligeable. Le mouvement d'une particule de point est caractérisé par un petit nombre de paramètres: sa position, de masse , et les forces qui lui sont appliquées. Chacun de ces paramètres est examiné à son tour.
En réalité, le genre d'objets qui peuvent décrire la mécanique classique ont toujours un non-zéro taille. (La physique des particules très petites, comme l' électronique , est décrite de façon plus précise par la mécanique quantique ). Objets avec non nulle taille ont un comportement plus compliqué que hypothétiques particules ponctuelles, en raison de la plus degrés de liberté exemple pour un baseball peut tourner pendant qu'il se déplace. Cependant, les résultats pour les particules ponctuelles peuvent être utilisés pour étudier de tels objets en les traitant comme objets composites, constituées d'un grand nombre de particules en interaction ponctuelles. Le centre de masse d'un objet composite se comporte comme une particule ponctuelle.
La mécanique classique utilisations notions de bon sens comment la matière et les forces existent et interagissent. Il suppose que la matière et l'énergie ont, connaissables attributs précis tels que où un objet est dans l'espace et sa vitesse. Il suppose également que les objets peuvent être directement influencées uniquement par leur environnement immédiat, connu sous le nom principe de localité. En mécanique quantique objets peuvent avoir la position inconnaissable ou la vitesse, ou instantanément interagir avec d'autres objets à distance.
Position et ses dérivés
| Le SI dérivées "mécanique" (Ce est-à-pas électromagnétique ou thermique) les unités avec kg, m et s | |
| position | m |
| position angulaire / angle | sans unité (radians) |
| vitesse | m · s -1 |
| vitesse angulaire | s -1 |
| accélération | m -2 · s |
| accélération angulaire | s -2 |
| secousse | m -3 · s |
| «Jerk angulaire" | s -3 |
| énergie spécifique | m 2 · s -2 |
| débit de dose absorbée | m 2 · s -3 |
| moment d'inertie | kg · m 2 |
| élan | kg · m · s -1 |
| moment angulaire | kg · m 2 · s -1 |
| force | kg · m -2 · s |
| torque | kg · m 2 · s -2 |
| énergie | kg · m 2 · s -2 |
| puissance | kg · m 2 · s -3 |
| pression et densité d'énergie | kg · m -2 · s -1 |
| tension de surface | kg · s -2 |
| constante de ressort | kg · s -2 |
| irradiance et flux d'énergie | -3 kg · s |
| viscosité cinématique | m 2 · s -1 |
| viscosité dynamique | kg · m -1 · s -1 |
| la densité (masse volumique) | kg · m -3 |
| densité (densité de poids) | kg · m -2 · s -2 |
| densité en nombre | m -3 |
| action | kg · m 2 · s -1 |
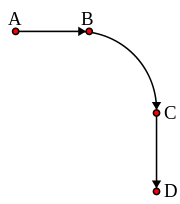
La position d'un particule ponctuelle est définie par rapport à un point fixe de référence arbitraire, O, dans espace, généralement accompagnée par un système de coordonnées, le point de référence situé à l'origine du système de coordonnées. Il est défini comme le vecteur r de O à la particules. En général, le point particules ne est pas nécessairement fixe par rapport à O, alors R est une fonction de t, le temps écoulé depuis un instant initial quelconque. Dans la relativité d'Einstein-pré (connu sous le nom Relativité galiléenne), est considéré comme un temps absolu, ce est à dire le laps de temps entre une paire donnée d'événements est le même pour tous les observateurs. En plus de se appuyer sur temps absolu, la mécanique classique assume la géométrie euclidienne pour la structure de l'espace.
La vitesse et la vitesse
La vitesse ou le taux de changement de la position dans le temps, est définie comme la dérivée de la position par rapport au temps ou
 .
.
En mécanique classique, les vitesses sont directement additif et soustractif. Par exemple, si une voiture roulant vers l'est à 60 kilomètres par heure passe une autre voiture vers l'est à 50 km / h, puis du point de vue de la voiture plus lente, la voiture plus rapide se déplace vers l'est à 60-50 = 10 km / h. Considérant que, du point de vue de la voiture plus rapide, la voiture est en mouvement lent 10 kilomètres par heure à l'ouest. Vitesses sont directement additif grandeurs vectorielles; elles doivent être traitées en utilisant l'analyse vectorielle .
Mathématiquement, si la vitesse du premier objet de la discussion précédente est représentée par le vecteur u = u j et la vitesse du second objet par le vecteur v = v e, où u est la vitesse du premier objet, v est la vitesse du second objet, et D et E sont des vecteurs unitaires dans les directions de mouvement de chaque particule, respectivement, alors la vitesse du premier objet tel que vu par le second objet est

De même,

Lorsque les deux objets se déplacent dans la même direction, cette équation peut être simplifiée

Ou, par la direction ignorant, la différence peut être donnée en termes de vitesse uniquement:

Accélération
L' accélération , ou le taux de variation de vitesse, est le dérivé de la vitesse en fonction du temps (la dérivée seconde de la position par rapport au temps) ou

Accélération peut résulter d'une variation dans le temps de la grandeur de la vitesse ou de la direction de la vitesse, ou les deux. Si seulement l'amplitude v de la vitesse décroît, ce est parfois appelée la décélération, mais en général, toute variation de la vitesse avec le temps, y compris la décélération, est simplement dénommé accélération.
Forces; La deuxième loi de Newton
Newton a été le premier à exprimer mathématiquement la relation entre la force et l'élan . Certains physiciens interprètent la deuxième loi de Newton sur le mouvement comme une définition de la force et de la masse, tandis que d'autres considèrent comme un postulat fondamental, une loi de la nature. Soit l'interprétation a les mêmes conséquences mathématiques, historiquement connue comme "la deuxième loi de Newton":
La quantité m v est appelé ( canonique) dynamique . La force nette sur une particule est donc égal au taux de changement de la dynamique de la particule avec le temps. Depuis la définition de l'accélération est un d = v / j t, la deuxième loi peut être écrit sous la forme simplifiée et plus familier:

Tant que la force agissant sur une particule est connue, la seconde loi de Newton est suffisante pour décrire le mouvement d'une particule. Une fois les relations indépendantes pour chaque force agissant sur une particule sont disponibles, ils peuvent être substitués à la deuxième loi de Newton pour obtenir une équation différentielle ordinaire , qui se appelle l'équation du mouvement.
A titre d'exemple, supposons que la friction est la seule force agissant sur la particule, et qu'elle peut être modélisée comme une fonction de la vitesse de la particule, par exemple:

où λ est une constante positive. Alors l'équation du mouvement est
Cela peut être intégré à obtenir
où v 0 est la vitesse initiale. Cela signifie que la vitesse de cette particule décroît exponentiellement à zéro que le temps progresse. Dans ce cas, un point de vue équivalent est que l'énergie cinétique de la particule est absorbée par frottement (qui convertit l'énergie en chaleur conformément à la conservation de l'énergie), le ralentir. Cette expression peut encore être intégré à obtenir la position R de la particule en tant que fonction du temps.
Forces importantes comprennent la force gravitationnelle et de la Force de Lorentz pour l'électromagnétisme . En outre, la troisième loi de Newton peut parfois être utilisée pour déduire les forces agissant sur une particule: si l'on sait que la particule A exerce une force F sur une autre particule B, il se ensuit que B doit exercer une force de réaction égale et opposée, - F , sur A. La forme forte de la troisième loi de Newton exige que F et - F acte le long de la ligne reliant A et B, tandis que la forme faible ne fonctionne pas. Illustrations de la forme faible de la troisième loi de Newton sont souvent trouvés pour les forces magnétiques.
Travail et énergie
Si une force F constante est appliquée à une particule qui permet d'obtenir un déplacement Δ r, le travail effectué par la force est définie comme étant la produit scalaire des vecteurs force et de déplacement:

Plus généralement, si la force varie en fonction de la position de la particule se déplace à partir de R 1 à R 2 le long d'un chemin d'accès C, le travail effectué sur la particule est donnée par la intégrale de ligne
Si le travail accompli dans le déplacement de la particule R 1 à R 2 est le même, peu importe quel chemin est pris, la force est dit conservatrice. gravité est une force conservatrice, comme ce est la force due à une idéalisée printemps, donnée par La loi de Hooke. La force due à frottement est non-conservatrice.
L' énergie cinétique E k d'une particule de masse m se déplaçant à la vitesse v est donnée par
Pour les objets étendus composés de plusieurs particules, l'énergie cinétique du corps composite est la somme des énergies cinétiques des particules.
Le théorème de l'énergie indique que pour une particule de masse constante suis le travail total W fait sur la particule de la position R 1 à R 2 est égale à la variation de l'énergie cinétique E k de la particule:

Les forces conservatrices peuvent être exprimés en gradient d'une fonction scalaire, connu sous le nom énergie potentielle et notée E p:

Si toutes les forces agissant sur une particule sont conservatrices, et E représente le total p énergie potentielle (qui est défini comme un travail des forces concernées à réorganiser positions mutuelles des organes), obtenu en additionnant les énergies potentielles correspondant à chaque force

Ce résultat est connu comme la conservation de l'énergie et affirme que le total de l'énergie ,

est constante dans le temps. Il est souvent utile, parce que beaucoup de forces couramment rencontrés sont prudentes.
Au-delà des lois de Newton
La mécanique classique comprend également des descriptions des mouvements complexes d'objets non ponctuels étendus. Les lois d'Euler fournissent extensions aux lois de Newton dans ce domaine. Les concepts de moment angulaire se appuient sur le même calcul utilisé pour décrire le mouvement à une dimension. Le équation de fusée se étend la notion de taux de variation de la dynamique d'un objet pour inclure les effets d'un objet "perte de masse".
Il existe deux formulations alternatives importantes de la mécanique classique: Équations de Lagrange et Mécanique hamiltonienne. Ces et d'autres formulations modernes, contournent souvent la notion de «force», se référant à la place d'autres grandeurs physiques, tels que l'énergie, la vitesse et l'élan, pour décrire les systèmes mécaniques coordonnées généralisées.
Les expressions données ci-dessus pour l'élan et l'énergie cinétique ne sont valables que quand il n'y a pas de contribution significative électromagnétique. En électromagnétisme, la deuxième loi de Newton pour les fils transportant le courant décompose moins on inclut la contribution du champ électromagnétique à la dynamique du système tel qu'il est exprimé par la Vecteur de Poynting divisé par 2 c, où c est la vitesse de la lumière dans l'espace libre.
Limites de validité
De nombreuses branches de la mécanique classique sont des simplifications ou des approximations de formes plus précises; deux de l'être le plus précis de la relativité générale et relativistes mécanique statistique . L'optique géométrique est une approximation de la la théorie quantique de la lumière, et ne ont pas une forme supérieure "classique".
L'approximation newtonienne à la relativité restreinte
Dans la relativité restreinte, l'impulsion d'une particule est donnée par

où m est la masse au repos de la particule, v sa vitesse, et c est la vitesse de la lumière.
Si v est très faible par rapport à c, v 2 / c 2 est approximativement égale à zéro, et ainsi

Ainsi l'équation newtonienne p = m c est une approximation de l'équation relativiste de corps en mouvement avec de faibles vitesses par rapport à la vitesse de la lumière.
Par exemple, la fréquence cyclotronique relativiste d'un cyclotron, gyrotron ou haute tension magnétron est donnée par
où f c est la fréquence classique d'un électron (ou tout autre particule chargée) avec T et de l'énergie cinétique ( repos) de masse m 0 encerclant dans un champ magnétique. Le (repos) masse d'un électron est 511 keV. Ainsi, la correction de fréquence est de 1% pour un tube à vide magnétique avec une tension de courant continu de 5,11 kV accélération.
L'approximation classique à la mécanique quantique
Le rapprochement des rayons de la mécanique classique se décompose lorsque le de Broglie longueur d'onde ne est pas beaucoup plus petite que les autres dimensions du système. Pour les particules non relativistes, cette longueur d'onde est

où h est P constante et de Planck est l'élan.
Encore une fois, ce qui se passe avec les électrons avant que cela arrive avec des particules plus lourdes. Par exemple, les électrons utilisées par Clinton Davisson et Lester Germer en 1927, accéléré par 54 volts, avait une longueur d'onde de 0,167 nm, ce qui était assez longtemps pour présenter un seul diffraction lobe côté lors de la réflexion de la surface de nickel cristal avec un espacement atomique de 0,215 nm. Avec un plus grand chambre à vide, il semblerait relativement facile d'augmenter la résolution angulaire d'environ un radian à une diffraction quantique milliradian et de voir des motifs périodiques de circuit intégré mémoire de l'ordinateur.
Des exemples plus concrets de l'échec de la mécanique classique à l'échelle de l'ingénierie sont la conduction par tunnel quantique dans diodes tunnel et très étroite transistor portes de circuits intégrés .
La mécanique classique est la même extrême rapprochement de fréquence élevée que optique géométrique. Il est le plus souvent exactes, car il décrit des particules et corps avec masse au repos. Celles-ci ont plus d'élan et donc plus courtes longueurs d'onde de Broglie que les particules sans masse, tels que la lumière, avec les mêmes énergies cinétiques.
Branches
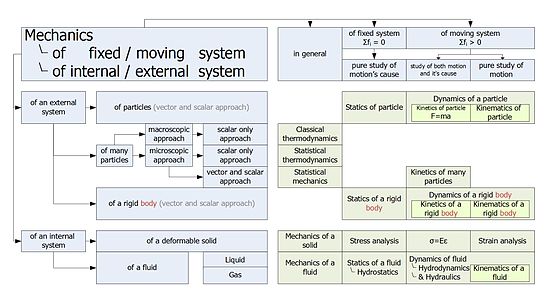
La mécanique classique a été traditionnellement divisée en trois branches principales:
- Statique, l'étude de équilibre et sa relation avec les forces
- Dynamics, l'étude du mouvement et sa relation avec les forces
- Cinématique , faire face aux conséquences de mouvements observés sans égard pour les circonstances les amenant
Une autre division est basée sur le choix du formalisme mathématique:
- Mécanique newtonienne
- Équations de Lagrange
- Mécanique hamiltonienne
En variante, une division peut être faite par région d'application:
- La mécanique céleste, relatives à étoiles , planètes et autres corps célestes
- Mécanique des milieux continus, pour les matériaux modélisés comme un continuum, par exemple, solides et fluides (c.-à- liquides et gaz ).
- Mécanique relativiste (y compris à-dire les particuliers et généraux théories de la relativité), pour les organismes dont la vitesse est proche de la vitesse de la lumière.
- Mécanique statistique , qui fournit un cadre pour relier les propriétés microscopiques des atomes et des molécules individuelles aux macroscopiques ou en vrac thermodynamiques propriétés des matériaux.