


Élan
Renseignements généraux
SOS Enfants, qui se déroule près de 200 sos écoles dans le monde en développement, a organisé cette sélection. Parrainage d'enfants aide les enfants du monde en développement à apprendre aussi.
| La mécanique classique |
|---|
|
Branches
|
Formulations Mécanique analytique ( Équations de Lagrange Mécanique hamiltonienne) |
Concepts fondamentaux
|
Les sujets fondamentaux Corps rigide
La loi de Newton de gravitation universelle
Inertiel / Non-inertielle cadre de référence
Mécanique des planaire mouvement des particules
|
Un mouvement de rotation Mouvement circulaire
Force centrifuge
|
Dans la mécanique classique , l'élan ( pl. moments; SI unité kg · m / s, ou, de façon équivalente, N · s) est le produit de la masse et de la vitesse d'un objet (p = mv). Pour des mesures plus précises de l'élan, consultez la section «définitions modernes de l'élan" sur cette page. Il est parfois appelé aussi linéaire dynamique pour le distinguer du sujet connexe de moment angulaire . La quantité de mouvement est un quantité de vecteur, car il a une direction et une amplitude. Le moment cinétique est un quantité de pseudovector parce qu'il gagne un signe supplémentaire en vertu d'une bascule Antirotation l'impulsion totale d'un groupe d'objets reste le même, sauf si des forces extérieures agissent sur l'objet.
Momentum est un quantité conservée, ce qui signifie que l'impulsion totale de tout système fermé (un pas affecté par des forces extérieures) ne peut pas changer.
Histoire du concept
Le mot et le concept général de l'élan a été utilisé dans le République romaine principalement signifie "un mouvement, le mouvement (comme une force qui l'habite ...)." Un poisson a été en mesure de changer de vitesse (velocitas) grâce à l'élan de sa queue. Le mot est formé par une accumulation de suffit sur la tige d' latine movere, "à se déplacer." Un movi-Men est le résultat de la movere comme frag-Men est le résultat de frangere, "à briser." Extension par -to- obtient mōvimentum et fragmentum, l'ancien contractant de Momentum.
L'élan ne était pas simplement la motion, qui était Motus, mais était le pouvoir résidant dans un objet en mouvement, capturé par des définitions mathématiques d'aujourd'hui. Un motus, «mouvement», a été une étape dans ne importe quel type de changement, tout en velocitas, "rapidité", capturé seulement vitesse. Les Romains, en raison des limites inhérentes au chiffre romain système, ne ont pas pu aller plus loin avec la perception.
L'arrivée de chiffres arabes dans le 10ème siècle a ouvert la porte à la philosophie quantitative moderne. Le concept de l'élan en mécanique classique a été lancée par un certain nombre de grands penseurs et des expérimentateurs. Le premier d'entre eux était Ibn Sina (Avicenne) circa 1000, qui se est référé à comme impulsion proportionnelle à fois en poids la vitesse . René Descartes appelée plus tard fois la masse vitesse que la force fondamentale de mouvement. Galileo dans son Deux nouvelles sciences utilisé l' italienne mot «impeto."
La question a été longuement débattu de ce que Sir Isaac Newton contribution de l 'au concept était. Apparemment rien, sauf à l'état plus pleinement et avec de meilleurs outils mathématiques ce qui a été déjà connus. La première et la seconde des Lois du mouvement de Newton avait déjà été énoncée par John Wallis dans son travail 1670, Mechanica sive De Motu, Tractatus geometricus: "l'état initial du corps, soit de repos ou de mouvement, vont persister" et "Si la force est supérieure à la résistance, le mouvement se traduira ... . "Wallis utilise élan et vis pour la force.
Newton "Principes mathématiques de la Natural History" quand le premier est sorti en 1686 a montré un casting similaire autour des mots à utiliser pour l'élan mathématique. Ses définit Définition II quantitas motus, «quantité de mouvement», comme «découlant de la vitesse et la quantité de la matière conjointement", qui l'identifie comme l'élan. Ainsi, quand en droit II, il se réfère à mutatio motus, "changement de mouvement," étant proportionnelle à la force impressionné, il est généralement pris pour signifier élan et pas le mouvement.
Il ne restait plus qu'à attribuer un terme standard pour la quantité de mouvement. La première utilisation de «momentum» dans son sens mathématique appropriée ne est pas clair, mais au moment de Miscellanées de Jenning en 1721, quatre ans avant la dernière édition de Principia Mathematica de Newton, l'élan M ou «quantité de mouvement» était défini pour les étudiants que "un rectangle", le produit de V et Q, où Q est "quantité de matière" et V est "vitesse", s / t.
La quantité de mouvement d'une particule
Si un objet se déplace dans toute trame de référence, puis elle a impulsion dans ce cadre. Il est important de noter que la quantité de mouvement est encadrer dépendante. Cela signifie que le même objet peut avoir une certaine impulsion dans une trame de référence, mais une quantité différente dans un autre cadre. Par exemple, un objet en mouvement a lancée dans un cadre de référence fixé à un point sur le sol, tout en ayant en même temps 0 dynamique dans un cadre de référence fixé à l'objet de centre de masse .
La quantité de mouvement d'un objet qui a dépend de deux grandeurs physiques: la masse et la vitesse de l'objet mobile dans la cadre de réference. En physique, le symbole usuel de l'élan est un petit p gras (gras, car il est un vecteur ); si cela peut se écrire:

où:
 est l'élan
est l'élan  est la masse
est la masse  la vitesse
la vitesse
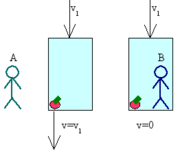
Exemple: un avion de modèle de 1 kg voyageant vers le nord à 1 m / s en vol rectiligne et le niveau a un élan de 1 kg m / s plein nord à partir du sol. Pour le pilote factice dans le cockpit, il a une vitesse et l'élan de zéro.
Selon la seconde loi de Newton le taux de variation de l'impulsion d'une particule est proportionnelle à la force résultante agissant sur la particule et est dans la direction de cette force. Dans le cas d'une masse constante, et des vitesses beaucoup moins que la vitesse de la lumière, cette définition résultats dans l'équation

ou tout simplement

où F est comprise comme étant la résultante .
Exemple: un avion de modèle de 1 kg accélère de repos à une vitesse de 1 m / sec, nord, 1 sec. La poussée nécessaire pour produire cette accélération est une newton. Le changement de momentum est un kg-m / sec. Pour le pilote factice dans le cockpit il n'y a pas de changement de vitesse. Son appuyant sur le siège arrière est une réaction à la poussée asymétrique, peu être pondérées par la traînée.
La quantité de mouvement d'un système de particules
Relative à la masse et de la vitesse
La quantité de mouvement d'un système de particules est la somme vectorielle des impulsions de tous les objets individuels dans le système.

où
 est la dynamique du système de particules
est la dynamique du système de particules  est la masse de l'objet i
est la masse de l'objet i  la vitesse de vecteur de l'objet i
la vitesse de vecteur de l'objet i  est le nombre d'objets dans le système
est le nombre d'objets dans le système
On peut montrer que, dans le centre de masse de l'élan d'un système est nulle. En outre, la dynamique dans un cadre de référence qui se déplace à une vitesse  par rapport à cette trame est simplement:
par rapport à cette trame est simplement:

où:
 .
.
Relative à motoventilé équations générales du mouvement
La quantité de mouvement d'un système de particules peut également être défini comme le produit de la masse totale  le système de fois la vitesse du centre de masse
le système de fois la vitesse du centre de masse

Ceci est communément connu comme seconde loi de Newton .
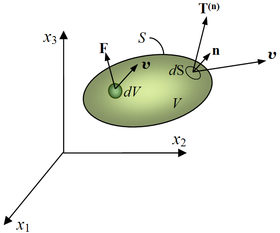
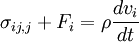
Pour une dérivation plus générale en utilisant tenseurs, nous considérons un corps mobile (voir la figure), supposé comme un continuum, occupant un volume  à la fois
à la fois  , Ayant une aire de surface
, Ayant une aire de surface  , Avec les forces de traction ou de surface définies
, Avec les forces de traction ou de surface définies  agissant sur tous les points de la surface du corps, les forces du corps
agissant sur tous les points de la surface du corps, les forces du corps  par unité de volume à chaque point dans le volume Et un champ de vitesse
par unité de volume à chaque point dans le volume Et un champ de vitesse  prévue dans le corps. À la suite de l'équation précédente, la quantité de mouvement du système est la suivante:
prévue dans le corps. À la suite de l'équation précédente, la quantité de mouvement du système est la suivante:

Par définition, le vecteur de stress est 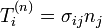 , Puis
, Puis

En utilisant le Divergence théorème de Gauss pour convertir une surface intégrante d'une partie intégrante de volume donne


Pour un volume arbitraire l'intégrale disparaît, et nous avons les équations de Cauchy du mouvement
Si un système est en équilibre, la variation de quantité de mouvement par rapport au temps est égal à 0, car il n'y a pas d'accélération.

ou en utilisant des tenseurs,

Ce sont les équations d'équilibre qui sont utilisés dans mécanique des solides pour résoudre les problèmes de élasticité linéaire. Dans la notation d'ingénierie, les équations d'équilibre sont exprimés en



Conservation de la quantité de mouvement
La loi de conservation de quantité de mouvement est une loi fondamentale de la nature, et il affirme que l'impulsion totale d'un système fermé d'objets (qui n'a pas d'interactions avec les agents extérieurs) est constante. Une des conséquences de ceci est que le centre de masse de toute Système selon la objets seront toujours continuer à la même vitesse, à moins sollicité par une force de l'extérieur du système.
Conservation du moment est une conséquence mathématique de la homogénéité (changement symétrie ) de l'espace (position dans l'espace est le la quantité de conjugué canonique dynamique). Donc, conservation de l'impulsion peut être philosophiquement a déclaré que «rien ne dépend de l'emplacement en soi".
Dans un système isolé (une où les forces externes sont absents) l'impulsion totale sera constante: ce est impliquée par Newton première loi du mouvement. Troisième loi du mouvement de Newton, le droit des actions réciproques , qui veut que les forces agissant entre les systèmes sont de grandeur égale, mais de signe opposé, est due à la conservation de l'impulsion.
Depuis position dans l'espace est une grandeur vectorielle, l'élan (soit le conjugué canonique de la position) est une grandeur vectorielle ainsi - il a la direction. Ainsi, lorsqu'un pistolet est tiré, la quantité de mouvement totale finale du système (le pistolet et la balle) est la somme vectorielle des quantités de mouvement de ces deux objets. En supposant que le pistolet et balle étaient au repos avant de tirer (ce qui signifie l'élan initial du système était de zéro), l'impulsion totale finale doit aussi égal à 0.
Dans un système isolé avec seulement deux objets, le changement dans la dynamique d'un objet doit être égale et opposée à la modification dynamique de l'autre objet. Mathématiquement,

Momentum a la propriété spéciale qui, dans un système de fermeture, il est toujours conservée, même en les collisions et les séparations causées par les forces explosives. L'énergie cinétique , d'autre part, ne est pas conservée dans des collisions se ils ne sont pas élastiques. Depuis dynamique est conservé il peut être utilisé pour calculer une vitesse inconnue après une collision ou une séparation si toutes les autres masses et les vitesses sont connues.
Un problème commun dans la physique qui nécessite l'utilisation de ce fait est la collision de deux particules. Depuis l'élan est toujours conservée, la somme des moments avant la collision doit être égale à la somme des moments après la collision:

où:
- u signifie vecteur vitesse avant la collision
- v signifie vecteur vitesse après la collision.
Habituellement, nous ne savons ni les vitesses avant ou après une collision et nous aimerions aussi savoir le contraire. Correctement résoudre ce problème signifie que vous devez savoir quel type de collision a eu lieu. Il ya deux types de base de collisions, qui tous deux conserver le moment:
- Collisions élastiques conserver l'énergie cinétique ainsi que quantité de mouvement totale avant et après la collision.
- Collisions inélastiques ne conserver l'énergie cinétique, mais quantité de mouvement totale avant et après la collision est conservée.
Collisions élastiques
Une collision entre deux boules de billard est un bon exemple d'une collision presque totalement élastique. En plus de l'élan étant conservé lorsque les deux balles se entrechoquent, la somme de l'énergie cinétique avant une collision doit être égale à la somme de l'énergie cinétique après:

Depuis le facteur 1/2 est commun à tous les termes, il peut être pris tout de suite.
Collision frontale (une dimension)
Dans le cas de deux objets en collision tête, nous constatons que la vitesse finale


qui peut alors facilement être reconstituées à

Cas particulier: m 1 m 2 >>
Considérons maintenant le cas où la masse d'un corps, par exemple 1 m, est beaucoup plus grande que celle de l'autre, m 2 (m 1 m 2 >>). Dans ce cas m 1 + m 2 est approximativement égal à m 1 et m 1 -m 2 est approximativement égale à 1 m.
L'utilisation de ces approximations, la formule ci-dessus pour  réduit à
réduit à  . Son interprétation physique est que dans le cas d'une collision entre deux corps, dont l'un est beaucoup plus massive que l'autre, le corps d'allumage finit par se déplacer dans la direction opposée par deux fois la vitesse initiale du corps plus massif.
. Son interprétation physique est que dans le cas d'une collision entre deux corps, dont l'un est beaucoup plus massive que l'autre, le corps d'allumage finit par se déplacer dans la direction opposée par deux fois la vitesse initiale du corps plus massif.
Cas particulier: m 1 = m 2
Un autre cas particulier est lorsque la collision est entre deux corps de masse égale.
Dites m1 de corps en mouvement à la vitesse v 1 grèves corps m 2 est au repos (v 2). Mettre ce cas dans l'équation dérivée ci-dessus, nous allons voir que, après la collision, le corps qui se déplaçait (m 1) commencera à se déplacer à la vitesse v 2 et la masse m 2 va commencer à se déplacer avec une vitesse v 1. Donc, il y aura un échange de vitesses.
Supposons maintenant que l'une des masses, dit m 2, était au repos. Dans ce cas, après la collision du corps en mouvement, m 1, viendra le repos et le corps qui était au repos, m 2, commencera à se déplacer à la vitesse que M 1 avait avant la collision.
Notez que toutes ces observations sont d'une collision élastique.
Ce phénomène se manifeste par Le berceau de Newton, l'un des exemples les plus connus de la conservation du moment, un exemple concret de ce cas particulier.
Collisions multi-dimensionnelles
Dans le cas d'objets qui entrent en collision dans plus d'une dimension, comme dans les collisions obliques, la vitesse est résolu en des composantes orthogonales avec une composante perpendiculaire au plan de collision et l'autre composant ou des composants dans le plan de collision. Les composantes de vitesse dans le plan de collision restent inchangées, tandis que la vitesse perpendiculaire au plan de collision est calculée de la même manière que le cas unidimensionnel.
Par exemple, en cas de collision à deux dimensions, les quantités de mouvement peut être décomposée en composantes x et y. On peut alors calculer chaque composant séparément, et de les combiner pour produire un résultat de vecteur. L'ampleur de ce vecteur est l'élan final du système isolé.
Voir la page collision élastique pour plus de détails. 
Collisions inélastiques
Un exemple courant d'une collision parfaitement inélastique, ce est quand deux boules de neige en collision puis collent ensemble par la suite. Cette équation décrit la conservation du moment:

On peut montrer qu'une collision parfaitement inélastique est celui dans lequel le montant maximal de l'énergie cinétique est convertie en d'autres formes. Par exemple, si les deux objets collent ensemble après la collision et se déplacent avec une vitesse finale commune, on peut toujours trouver un cadre de référence dans lequel les objets sont mis au repos par la collision et 100% de l'énergie cinétique est convertie. Cela est vrai même dans le cas relativiste et utilisées dans accélérateurs de particules pour convertir efficacement l'énergie cinétique en de nouvelles formes de masse-énergie (ce est à dire pour créer des particules massives).
En cas de collision inélastique, il ya un paramètre attaché appelé coefficient de restitution (notée minuscule «e» ou «c» dans de nombreux livres de texte). Il est défini comme le rapport de vitesse relative de séparation à une vitesse relative d'approche. Ce est un rapport où il est une grandeur sans dimension.
Quand on a une collision élastique la valeur de e (= coefficient de restitution) est 1, ce est à dire la vitesse relative d'approche est égale à la vitesse relative de séparation des corps en collision. Dans une collision élastique l'énergie cinétique du système est conservée.
Lorsqu'une collision est pas élastique (e <1), il se agit d'une collision élastique. Dans le cas d'une collision parfaitement inélastique de la vitesse relative de séparation du centre de masse du corps en collision est 0. Par conséquent, après collision organes coller ensemble après collision. Dans le cas d'une collision inélastique la perte d'énergie cinétique est maximale comme indiqué ci-dessus.
Dans tous les types de collision si aucune force extérieure ne agit sur le système des organes collision, l'élan obtiendrez toujours préservé.
Explosions
Une explosion se produit lorsqu'un objet est divisé en deux ou plusieurs fragments en raison d'une libération d'énergie. Notez que l'énergie cinétique d'un système d'explosion ne est pas conservée car elle implique la transformation d'énergie. (ce est à dire des changements de l'énergie cinétique en énergie thermique et sonore)
http://www.glenbrook.k12.il.us/gbssci/phys/Class/momentum/u4l2e.html
Dans le canon démonstration explosion, la dynamique du système totale est conservée. Le système se compose de deux objets - un canon et une balle de tennis. Avant l'explosion, l'impulsion totale du système est nul car le canon et la balle de tennis situé à l'intérieur de celui-ci sont à la fois au repos. Après l'explosion, la quantité de mouvement totale de l'installation doit toujours être égal à zéro. Si la balle acquiert 50 unités de l'élan avant, puis le canon acquiert 50 unités de l'arrière élan. La somme vectorielle des quantités de mouvement individuel des deux objets est 0. dynamique totale du système est conservée.
Voir la la page de collision inélastique pour plus de détails.
Les définitions modernes de l'élan
Momentum en mécanique relativiste
Dans la mécanique relativiste, pour être conservé, l'élan doit être défini comme:

où
 est le masse invariante de l'objet mobile,
est le masse invariante de l'objet mobile, 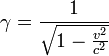 est le Facteur de Lorentz
est le Facteur de Lorentz  est la vitesse relative entre un objet et un observateur
est la vitesse relative entre un objet et un observateur  est la vitesse de la lumière .
est la vitesse de la lumière .
Dynamique relativiste peut également être écrit comme temps de masse invariante de l'objet la vitesse appropriée, défini comme le taux de changement de position de l'objet dans le cadre d'observateur par rapport au temps écoulé sur les horloges de l'objet (c.-à-objet bon moment). Dynamique relativiste devient dynamique newtonienne:  à basse vitesse
à basse vitesse  .
.

 , Masse invariante , Et l'élan relativiste
, Masse invariante , Et l'élan relativiste  . Se il vous plaît noter que dans la notation utilisée par le créateur de la figure, la masse invariante
. Se il vous plaît noter que dans la notation utilisée par le créateur de la figure, la masse invariante  est indexée par un zéro, .
est indexée par un zéro, . Relativiste quatre dynamique proposée par Albert Einstein découle de l'invariance de -quatre vecteurs sous la traduction de Lorentz. Les quatre-dynamique est définie comme:
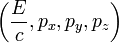
où
 est le
est le  composante de la dynamique relativiste,
composante de la dynamique relativiste, - est l'énergie totale du système:

La "longueur" du vecteur est la masse multipliée par la vitesse de la lumière, qui est invariante pour toutes les trames de référence:

Momentum d'objets sans masse
Objets sans masse au repos, comme les photons , portent aussi dynamique. La formule est la suivante:

où
 est La constante de Planck,
est La constante de Planck,  est le longueur d'onde du photon,
est le longueur d'onde du photon, - est l' énergie du photon et porte
- est la vitesse de la lumière .
Généralisation de l'élan
Momentum est le Noether responsable de l'invariance de translation. Ainsi, même les champs ainsi que d'autres choses peuvent avoir l'élan, pas de particules juste. Cependant, espace-temps courbe qui ne est pas asymptotiquement Minkowski, l'élan ne est pas défini du tout.
Momentum en mécanique quantique
En mécanique quantique , l'élan est définie comme une opérateur sur la fonction d'onde. Le Heisenberg principe d'incertitude définit les limites de la précision de l'élan et de la position d'un système unique observables peuvent être connus à la fois. En mécanique quantique, la position et l'élan sont les variables conjugué.
Pour une seule particule sans charge électrique et aucune rotation, l'opérateur de l'élan peut être écrit dans la base de position
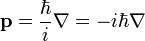
où:
 est le opérateur gradient;
est le opérateur gradient;  est le réduit la constante de Planck;
est le réduit la constante de Planck;  est l' unité imaginaire .
est l' unité imaginaire .
Ce est une forme couramment rencontré de l'opérateur de l'élan, mais pas la plus générale.
Momentum en électromagnétisme
Les champs électriques et magnétiques possèdent dynamique indépendamment du fait qu'ils sont statiques ou ils changent dans le temps. Ce est une grande surprise pour étudiants de première année qui sont introduits dans le fait bien connu de la pression  d'un électrostatique (magnétostatique) champ sur une sphère de métal, la capacité cylindrique ou barreau ferromagnétique:
d'un électrostatique (magnétostatique) champ sur une sphère de métal, la capacité cylindrique ou barreau ferromagnétique:
![P_ {static} = {} W = [{\ epsilon_0 \ epsilon} {\ frac {{\ mathbf E} ^ 2} {{2}}} + {\ frac {1} {{\ mu_0 \ mu}}} {\ frac {{\ mathbf B} ^ 2} {{2}}}],](../../images/160/16078.png)
où  ,
,  ,
,  , Sont la densité d'énergie électromagnétique, champs électriques et magnétiques respectivement. La pression électromagnétique
, Sont la densité d'énergie électromagnétique, champs électriques et magnétiques respectivement. La pression électromagnétique  peut être suffisamment élevée pour la capacité d'exploser. Ainsi, les champs électriques et magnétiques ne portent élan.
peut être suffisamment élevée pour la capacité d'exploser. Ainsi, les champs électriques et magnétiques ne portent élan.
Lumière (visible, UV, radio) est une onde électromagnétique et a aussi dynamique. Même si photons (aspect corpusculaire de la lumière) ne ont pas de masse, ils portent encore très dynamique. Cela conduit à des applications telles que la voile solaire.
Momentum est conservée dans un système électrodynamique (il peut changer d'une dynamique dans les domaines de la dynamique mécanique de pièces mobiles). Le traitement de la dynamique d'un champ est habituellement réalisé en considérant que l'on appelle tenseur impulsion-énergie et le changement dans le temps de la Vecteur de Poynting intégrée sur un peu de volume. Ce est un champ tensoriel qui a des composantes liées à la densité d'énergie et la densité de quantité de mouvement.
La définition canonique dynamique correspondant à l'opérateur de quantité de mouvement de la mécanique quantique quand il interagit avec le champ électromagnétique est, en utilisant la principe de couplage moins:
 ,
,
au lieu de la coutumier
 ,
,
où:
 est le potentiel vecteur électromagnétique
est le potentiel vecteur électromagnétique  masse invariante de la particule chargée
masse invariante de la particule chargée  sa vitesse
sa vitesse  sa charge.
sa charge.