

Mars Exploration Rover
Você sabia ...
Crianças SOS voluntários ajudaram a escolher artigos e fez outros materiais currículo SOS mães cada um cuidar de uma família de crianças apadrinhadas .

NASA Mars Exploration Rover (MER) Mission 's é uma constante missão robótica de explorar Marte , que começou em 2003 com o envio de dois rovers - Espírito e Opportunity - para explorar a superfície marciana e geologia . A missão é liderada pelo Gerente de Projetos Peter Theisinger da NASA 's Jet Propulsion Laboratory e investigador principal Steven Squyres, professor de astronomia na Universidade de Cornell.
Primária entre os objetivos científicos da missão é procurar e caracterizar uma ampla gama de rochas e solos que possuem pistas para atividade de água no passado de Marte. A missão é parte do Programa de Exploração de Marte da NASA que inclui três sondas anteriores bem sucedidas: os dois Sondas Viking em 1976 e Pathfinder em 1997.
O custo total de construção, lançamento, pouso e operar os robôs na superfície para o 90 dias inicial principal missão foi de cerca de US $ 820 milhões. Uma vez que os rovers ainda estão funcionando quatro anos após o desembarque, o financiamento da missão foi prorrogado para "possivelmente até 2009". Em julho de 2007, tempestades de poeira marcianos bloqueou a luz solar para os rovers e ameaçou a capacidade da embarcação para recolher energia através da sua painéis solares, fazendo com que os engenheiros a temer que um ou ambos poderia ser permanentemente incapacitadas; no entanto, as tempestades de poeira levantaram e ambos os rovers ter retomado operações.
Em reconhecimento à grande quantidade de informação científica acumulada por ambos os rovers, dois asteróides ter sido nomeado em sua homenagem: 37.452 Espírito e 39382 Opportunity.
Timeline
O MER-A rover, Spirit, foi lançado em 10 de junho de 2003 em 17:59 UTC, e MER-B, Oportunidade, em 7 de julho de 2003 em 15:18 UTC. Espírito pousou em Gusev cratera na 4 de janeiro de 2004 em 4:35 Chão UTC. Opportunity pousou no Meridiani Planum, no lado oposto de Marte a partir de Espírito, em 25 de janeiro de 2004 05:05 UTC do-chão. Na semana seguinte desembarque Spirit 's, o site da NASA registrou 1,7 bilhão de acessos e 34,6 terabytes de dados transferidos, superando recordes de anteriores missões da NASA.

Em 21 de janeiro de 2004 , o Deep Space Network perdeu o contato com o Espírito, por razões originalmente pensado para ser relacionado a uma tempestade sobre a Austrália . O rover transmitiu uma mensagem sem dados, mas mais tarde naquele dia perdeu outra sessão de comunicações com a Mars Global Surveyor. No dia seguinte, JPL conseguiu receber um bip do rover, indicando que ele estava no modo de falha. No dia 23, a equipe de voo conseguiu fazer o rover de envio. A falha se acreditava ter sido causado por um erro no rover da Subsistema de memória flash. O rover não realizou quaisquer actividades científicas por 10 dias, enquanto os engenheiros atualizou o seu software e correu testes. O problema foi corrigido pela reformatação memória flash do Espírito e atualizar o software com um patch para evitar a sobrecarga de memória; Oportunidade também foi atualizado com o patch como uma precaução Espírito voltou para operações científicas completas por. 05 de fevereiro. Esta tem sido até à data o mais grave anomalia na missão.
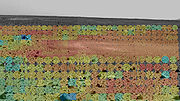
Em 23 de março de 2004 , uma conferência de imprensa foi realizada anunciando "grandes descobertas" de evidência de líquido passado de água na superfície marciana. Uma delegação de cientistas mostraram fotos e dados que revelem um padrão estratificado e estratificação cruzada nas rochas do afloramento dentro de uma cratera em Meridiani Planum, local de pouso de MER-B, Oportunidade, sugerindo que a água fluiu uma vez na região. A distribuição irregular de cloro e bromo também sugere que o lugar era uma vez que a linha costeira de um mar salgado, agora evaporado.
Em 8 de abril de 2004 , a Nasa anunciou que estava estendendo a vida da missão dos rovers 3-8 meses. Ele imediatamente fornecido um financiamento adicional de US $ 15 milhões até setembro, e 2,8 milhões dólares por mês para operações contínuas.
Em 30 de abril de 2004 , Opportunity chegou à Endurance cratera, levando cerca de 5 dias para conduzir os 200 metros.
Em 22 de setembro de 2004 , a Nasa anunciou que estava estendendo a vida da missão dos rovers por mais 6 meses. Opportunity era deixar cratera Endurance, visite seu escudo térmico descartado, e proceder à Victoria cratera. Espírito era tentar subir ao topo do Columbia Hills.
Em 6 de abril de 2005 , com os dois rovers ainda funcionando bem, a NASA anunciou uma extensão da missão de 18 meses até Setembro de 2006. Opportunity foi visitar o "Etched Terrain" e Espírito era escalar uma encosta rochosa em direção ao topo Marido Hill.
Em 21 de agosto de 2005 , o Espírito atingiu o cume do monte marido depois de 581 sóis e uma viagem de 4,81 quilômetros (2,99 milhas).
Espírito comemorou seu aniversário de um ano marciano (669 soles ou 687 dias terrestres) em 20 de novembro de 2005 . Opportunity comemorou seu aniversário em De Dezembro de 12. No início da missão, esperava-se que os robôs não iria sobreviver muito mais tempo do que 90 dias. As Columbia Hills eram "apenas um sonho" de acordo com motorista rover Chris Leger.
Em 7 de fevereiro de 2006 , atingiu o Espírito formação rochosa conhecida como semicircular Home Plate. É um afloramento de rocha em camadas que intriga os cientistas e excita. Pensa-se que suas rochas vulcânicas explosivas são depósitos, embora existam outras possibilidades, incluindo depósitos de impacto ou vento / água a cargo de sedimentos.
Em 13 de março de 2006 , a roda dianteira direita do Espírito parou de trabalhar enquanto o rover estava se movendo-se a McCool Hill. Seus motoristas tentaram arrastar a roda mortos por trás Espírito, mas isso só trabalhou até chegar a uma área arenosa intransitáveis nas encostas mais baixas. Drivers dirigido Espírito para uma característica inclinada menor, apelidado de "crista baixa Haven", onde ela passou o longo inverno marciano, mola de espera e aumento dos níveis de energia solar adequados para a condução.
Em 26 de setembro de 2006 , Spaceflight Agora NASA informou que ampliou missão para os dois rovers a setembro de 2007. Em 27 de Setembro, 2006 , Oportunidade atingiu a borda da Cratera Victoria.
Espírito tinha durado mais de 1000 dias marcianos explorar Cratera Gusev a partir de 25 de outubro de 2006 . Opportunity tinha durado mais de 1000 dias marcianos explorar como Meridiani Planum de 16 de novembro de 2006 . Em 24 de janeiro de 2007 , os rovers em Marte tinha durado mais de três anos. (Embora Opportunity pousou em 25 de janeiro, o ano de 2004 foi um ano bissexto).
Em 6 de fevereiro de 2007 , Opportunity tornou-se a primeira nave espacial para percorrer 10.000 metros - 10 km - na superfície de Marte.
Em 28 de junho de 2007 , Opportunity estava prestes a entrar Cratera de Victoria de sua vara na borda de Duck Bay., mas devido a extensas tempestades de poeira, foi adiada indefinidamente até que a poeira tinha desaparecido eo poder voltou a níveis seguros.
Em 28 de agosto de 2007 , Spirit e Opportunity voltou a dirigir depois de se entrincheirando em fúria durante tempestades de poeira que limitaram a energia solar a um nível que quase causou a falha permanente de ambos os rovers.
Em 1 de outubro de 2007 , tanto o Spirit e Opportunity entrou no seu quinto extensão da missão que poderia estender operações em 2009, permitindo que os rovers ter passado cinco anos a explorar a superfície marciana, enquanto se aguarda a sua sobrevivência.
Em 3 de janeiro de 2008 , o Espírito entrou em seu quarto ano de exploração de Cratera Gusev.
Projeto da nave espacial



A Mars Exploration Rover foi projetado para ser arrumados no nariz de um Foguete Delta II. Cada nave espacial consiste em vários componentes:
- Rover: 185 kg (408 lb)
- Lander: 348 kg (767 lb)
- Backshell / Parachute: 209 kg (461 lb)
- Heat Shield: 78 kg (172 lb)
- Cruise Stage: 193 kg (425 lb)
- Propulsor: 50 kg (110 lb)
Massa total 1063 kg (£ 2.343).
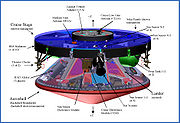
Fase Cruise
A fase de cruzeiro é o componente da nave espacial que é usado para o curso da Terra para Marte. É muito semelhante ao Mars Pathfinder no desenho e é de aproximadamente 2,65 metros (8,7 pés) de diâmetro e 1,6 m (5,2 pés) de altura, incluindo o veículo de entrada (ver abaixo).
A estrutura primária é de alumínio com um anel exterior de nervuras coberto pela painéis solares, que são cerca de 2,65 m (8,7 pés) de diâmetro. Dividido em cinco seções, os painéis solares podem fornecer até 600 watts de potência perto da Terra e 300 W em Marte.
Aquecedores e isolamento multi-layer manter a eletrônica "quente". A sistema de freon remove o calor do computador de vôo e comunicações de hardware dentro do rover para que eles não sobreaquecer. Sistemas aviônicos de cruzeiro permitem que o computador de vôo para fazer a interface com outros aparelhos eletrônicos, tais como os sensores de sol, estrela do scanner e aquecedores.
O digitalizador estrela (com um sistema de backup) e sensor de sol permitiu que a nave espacial para saber sua orientação no espaço através da análise da posição do Sol e outras estrelas em relação a si mesmo. Às vezes, o ofício Poderia ser um pouco fora do curso; isso era esperado dada a jornada 500.000 mil quilômetros (320 milhões milhas). Assim navegadores planejado até seis manobras de correção de trajetória, juntamente com exames de saúde.
Para garantir a sonda chegou a Marte no lugar certo para o seu desembarque, dois peso-leve, tanques forrado de alumínio realizada cerca de 31 kg (cerca de 68 lb) de hidrazina propulsor. Junto com sistemas de orientação e controle de cruzeiro, o propulsor navegadores autorizados a manter a nave em curso. Queimaduras e pulso disparos de o propulsor permitiu três tipos de manobras:
- Uma queimadura axial utiliza pares de propulsores para alterar a velocidade nave espacial;
- Uma queimadura de lateral usa dois "clusters thruster" (quatro propulsores por cluster) para mover a nave espacial "de lado" através de pulsos segundos de duração;
- Modo de pulso de disparo utiliza pares de propulsão para naves acopladas manobras de precessão (voltas).
Comunicação
A nave espacial usou uma alta frequência Banda X rádio comprimento de onda para se comunicar, o que permitiu menos energia e menor antenas do que muitos ofício mais velho, que costumava S banda.
Navigators enviou comandos através de duas antenas no palco cruzeiro: um cruzeiro baixo ganho antena montada no interior do anel interno, e um cruzeiro de médio ganho da antena no anel externo. A antena de baixo ganho foi usada perto da Terra. É omni-direcional, então a potência de transmissão que chegou à Terra caiu rapidamente com o aumento da distância. Como a embarcação se aproximou de Marte, o Sol ea Terra se aproximou no céu como visto de ofício, de modo menos energia atingiu a Terra. Em seguida, a sonda ligado à antena de meio de ganho, que dirigiu a mesma quantidade de potência de transmissão para um feixe apertado para a terra.
Durante o voo, a nave espacial foi spin-estabilizada com uma velocidade de rotação de 2 rpm. Atualizações periódicas mantido antenas apontou em direção à Terra e painéis solares em direção a Sun.
Aeroshell
O aeroshell formada uma cobertura protetora para o lander durante a viagem sete meses a Marte. Juntamente com o lander eo rover, constituiu o "veículo de entrada". Seu principal objetivo era proteger o lander eo rover dentro do intenso aquecimento da entrada na atmosfera marciana fina. Foi baseado nos projetos Mars Pathfinder e Mars Viking.
Parts
O aeroshell foi feita de duas partes principais: um escudo térmico e um backshell. O escudo de calor era plana e marrom, e protegido do lander e rover do intenso calor da entrada na atmosfera marciana e atuou como o primeiro aerobrake para a nave espacial. O backshell era grande, e pintada de branco em forma de cone. Ele levou o pára-quedas e vários componentes usados em estágios posteriores da entrada, descida e aterragem, incluindo:
- Um pára-quedas (arrumadas no topo do backshell);
- Os componentes eletrônicos e baterias Backshell que o fogo fora de dispositivos pirotécnicos como nozes de separação, foguetes e argamassa pára-quedas;
- Uma Unidade Litton LN-200 inércia de medição (IMU), que monitora e relata a orientação do backshell à medida que passa sob o pára-quedas;
- Três grandes motores de foguetes sólidos chamados foguetes RAD (Foguete Descida Assistida), cada uma com cerca de uma tonelada de força (10 kilonewtons) por mais de 2 segundos;
- Três pequenos foguetes sólidos chamado TIRS (montada de modo que eles visam horizontalmente para fora os lados do backshell) que fornecem um pequeno pontapé horizontal ao backshell para ajudar a orientar o backshell mais verticalmente durante a principal RAD foguete queimadura.
Composição
Construído pela Lockheed Martin Astronautics Co. em Denver, Colorado, a aeroshell é feito de uma estrutura de favo de mel de alumínio imprensado entre folhas de face de grafite-epoxi. O exterior do aeroshell é coberto com uma camada de fenólico de favo de mel. Este favo de mel é preenchido com um material de ablativa (também chamado um "ablator"), que dissipa o calor gerado pelo atrito atmosférico.
O ablator em si é uma mistura única de cortiça madeira , ligante e muitos pequenos sílica esferas de vidro. Foi inventado para os escudos de calor efetivamente voaram em missões Viking lander de Marte. Uma tecnologia semelhante foi usado no primeiro US missões espaciais tripuladas Mercury, Gêmeos e Apollo. Foi especialmente formulado para reagir quimicamente com a atmosfera de Marte durante a entrada e levar calor para longe, deixando um rastro quente de gás atrás do veículo. O veículo diminuiu de 19000 km / h (cerca de 12000 mph) a cerca de 1600 km / h (1000 mph) em cerca de um minuto, produzindo cerca de 60 m / s² (6 g) de aceleração no lander e rover.
O backshell e escudo térmico são feitas com os mesmos materiais, mas o escudo de calor tem uma espessa 1/2 polegada (12,7 mm) da camada ablator. Além disso, em vez de ser pintado, o backshell foi coberto com uma aluminizado muito fina Cobertor filme PET para protegê-lo do frio do espaço profundo. O cobertor vaporizado durante a entrada na atmosfera de Marte.
Pára-quedas

O pára-quedas ajudou a desacelerar a nave espacial durante a entrada, descida e pouso. Ele está localizado na backshell.
Projeto
O projeto 2003 do pára-quedas era parte de uma tecnologia de pára-quedas Mars longo prazo esforço de desenvolvimento e é baseado nos projetos e experiências das missões Viking e Pathfinder. O pára-quedas para esta missão é de 40% maior do que o Pathfinder é porque a maior carga para a Mars Exploration Rover é de 80 a 85 quilonewtons (kN) ou 18.000 a 19.000 lbf (85 kN) quando o pára-quedas infla totalmente. Em comparação, as cargas de inflação do Pathfinder foram de aproximadamente 35 kN (cerca de 8.000 lbf). O pára-quedas foi projetado e construído em South Windsor, Connecticut por Pioneer Aerospace ( site), a empresa que projetou também o pára-quedas para o Missão Stardust.
Composição
O pára-quedas é feita de duas duráveis, tecidos leves: poliéster e nylon. A brida triplo feito de Kevlar liga o pára-quedas para o backshell.
A quantidade de espaço disponível a bordo da sonda para o pára-quedas é tão pequena que o pára-quedas de pressão tinha de ser embalado. Antes do lançamento, uma equipe com força dobrada as linhas 48 de suspensão, três linhas de freio, e o pára-quedas. A equipe de pára-quedas carregado o pára-quedas em uma estrutura especial que então aplicado um peso pesado para o pacote de pára-quedas várias vezes. Antes de colocar o pára-quedas no backshell, o pára-quedas foi definido para calor esterilizá-lo.
Sistemas conectados

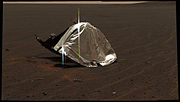
Zylon Cabeçadas: Após o pára-quedas foi implantado a uma altitude de cerca de 10 km (6 milhas) acima da superfície, o escudo térmico foi lançado usando 6 porcas de separação e empurre-off molas. A sonda então separado do backshell e "rappelled" para baixo uma fita metálica numa Sistema de travagem de centrífuga construída em uma das pétalas sonda. A descida lenta para baixo a fita metálica colocada a sonda na posição no final de um outro freio (corda), feito de uma cerca de 20 m (65 pés) de comprimento trançado Zylon.
Zylon é um material de fibra avançado semelhante ao Kevlar que é costurada em um padrão de correias (como material de cadarço) para torná-lo mais forte. A cabeçada Zylon oferece espaço para implantação de airbag, distância do fluxo sólido de escape do motor do foguete, e maior estabilidade. A cabeçada incorpora um chicote elétrico que permite o disparo de foguetes sólidos do backshell, bem como fornece dados da unidade de medida inercial backshell (que mede a taxa e inclinação da nave espacial) para o computador de vôo no rover.
Descida do foguete assistida (RAD): motores. Porque a densidade atmosférica de Marte é inferior a 1% do da Terra, o pára-quedas por si só não poderia retardar o Mars Exploration Rover suficiente para garantir um cofre, baixa velocidade de pouso. A descida nave espacial foi assistido por foguetes que trouxeram a nave espacial a um beco sem parar 10-15 m (30-50 ft) acima da superfície marciana.
Unidade de radar altímetro: Um radar unidade altímetro foi utilizado para determinar a distância para a superfície marciana. A antena do radar está montado em um dos cantos inferiores do tetraedro sonda. Quando a medição por radar mostrou a lander foi a distância correta acima da superfície, o freio Zylon foi cortado, libertando o lander do pára-quedas e backshell de modo que era livre e esclarecido para a aterragem. Os dados do radar também permitiu que a seqüência temporal na inflação do airbag e backshell RAD foguete de fuzilamento.
Airbags

Airbags usado na missão Mars Exploration Rover são do mesmo tipo que Mars Pathfinder usado em 1997. Eles tiveram que ser forte o suficiente para amortecer a nave espacial se ele desembarcou em rochas ou terrenos acidentados e permitir-lhe saltar em toda a superfície de Marte em velocidades de auto-estrada após o desembarque. Os airbags tiveram de ser inflado segundos antes do pouso e esvaziado uma vez no chão em segurança.
Os airbags foram feitas de Vectran, como aqueles em Pathfinder. Vectran tem quase duas vezes a força de outros materiais sintéticos, tais como o Kevlar, e tem melhor desempenho em temperaturas frias. Seis 100 denier (10 mg / m) camadas de Vectran protegida uma ou duas ampolas interiores de Vectran em 200 denier (20 mg / m). Usando 100 denier (10 mg / m) deixa mais tecido nas camadas exteriores onde é necessário, porque há mais segmentos no tecido.
Cada rover usados quatro airbags com seis lóbulos cada, que foram todos ligados. Conexão foi importante, pois ajudou a diminuir algumas das forças de desembarque, mantendo o sistema de bolsa flexível e sensível à pressão do solo. Os airbags não foram anexados diretamente para o rover, mas foram realizadas a ele por meio de cordas que cruzam a estrutura saco. As cordas deu a forma bolsas, tornando mais fácil a inflação. Enquanto em vôo, os sacos foram arrumadas junto com três geradores de gás que são usados para a inflação.
Lander

O lander nave espacial é um "escudo" de proteção que abriga o rover e protege-lo, juntamente com o airbags, das forças de impacto.
A sonda é um tetraedro forma cujos lados abrem como pétalas. Ele é forte e leve, e feito de vigas e chapas. As vigas consistem em camadas de fibra de grafite tecidos num tecido que é mais leve do que o alumínio e mais rígida do que o aço . Acessórios de titânio são colados e encaixada sobre as vigas que lhe permita ser aparafusado em conjunto. O rover foi realizada dentro do lander por parafusos e porcas especiais que foram lançadas após o desembarque com pequenos explosivos.
Verticalização
Após a lander parou saltando e rolando no chão, ele veio descansar na base do tetraedro ou um de seus lados. Em seguida, os lados abertos para fazer a base horizontal e o móvel na vertical. Os lados são ligados à base por meio de dobradiças, cada uma das quais tem um motor forte o suficiente para levantar a sonda. O rover mais lander tem uma massa de cerca de 533 kg (1.175 libras). O rover sozinho pesa cerca de 185 kg (408 libras). A gravidade em Marte é cerca de 38% do da Terra, de modo que o motor não precisa ser tão poderosa como seria na Terra.
O rover contém acelerômetros para detectar qual o caminho é para baixo (na direção da superfície de Marte), medindo a força da gravidade. O computador rover então comandou o lander pétala correta para abrir a colocar o rover vertical. Uma vez que a base pétala era baixo eo rover estava de pé, as outras duas pétalas se abriram.
As pétalas inicialmente abertos para uma posição igualmente plana, para que todos os lados do lander foram reto e nivelado. Os motores pétalas são fortes o suficiente para que, se duas das pétalas vêm para descansar sobre rochas, a base com o rover seria mantido no lugar como uma ponte acima do solo. A base irá realizar a um nível, mesmo com a altura das pétalas que descansam em rochas, fazendo uma superfície plana linear ao longo do comprimento da abertura, achatada sonda. A equipe de vôo na Terra poderia, então, enviar comandos para o rover para ajustar as pétalas para criar um caminho seguro para o rover para expulsar o lander e sobre a superfície marciana, sem deixar cair fora de uma rocha íngreme.
Movendo-se a carga sobre Marte
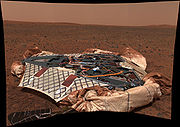
O movimento do rover fora da lander é chamada a fase de saída da missão. O rover deve evitar ter suas rodas capturados no material airbag ou cair de um declive acentuado. Para ajudar a isso, um sistema de retração nas pétalas arrasta lentamente os airbags para o lander antes das pétalas. Pequenas rampas no ventilador pétalas fora para preencher os espaços entre as pétalas. Eles cobrem terrenos irregulares, obstáculos de rock, e material de airbag, e formam uma área circular a partir do qual o rover pode dirigir fora em mais direções. Eles também diminuir o passo que o rover deve descer. Eles são apelidados de "batwings", e são feitos de Vectran pano.
Cerca de três horas foram distribuídos para retrair os airbags e implantar as pétalas lander.
Projeto Rover

As sondas são de seis rodas, robôs movidos a energia solar que ficam a 1,5 m (4,9 pés) de altura, 2,3 m (7,5 pés) de largura e 1,6 m (5,2 pés) de comprimento. Pesam 180 kg (400 lb), 35 kg (80 lb) de que é o sistema de roda e suspensão.
Sistema de acionamento
Cada rover tem seis rodas montadas em um sistema de suspensão balancim-bogie que garanta rodas permanecem no solo durante a condução por terrenos acidentados. O projeto reduz a amplitude de movimento do corpo rover pela metade, e permite que o rover para passar por cima de obstáculos ou através de buracos que são mais do que um diâmetro da roda 250 mm (ou 10 polegadas) de tamanho. Cada roda também tem grampos, proporcionando aderência para escalar em areia macia e lutando em cima de pedras.
Cada roda tem o seu próprio motor. Os dois da frente e duas rodas traseiras têm cada motores de direção individuais. Isso permite que o veículo para virar no lugar, uma volta completa, e para desviar e curva, tornando arqueamento voltas. O rover é projetado para suportar uma inclinação de 45 graus em qualquer direção sem virar. No entanto, o rover está programado através de seus "limites de protecção de falha" em seu software de prevenção de risco para evitar exceder inclinações de 30 graus.
Cada rover pode girar uma de suas rodas dianteiras no lugar para moer profundamente no terreno. É a permanecer imóvel enquanto a roda de escavação está girando.
O rover tem uma velocidade máxima em terreno duro plana de 50 mm / s (2 pol / s). Mas sua velocidade média é de 10 mm / s porque seu software de prevenção de risco faz com que ele pare a cada 10 segundos durante 20 segundos para observar e compreender o terreno que tem impulsionado em.
Sistemas de energia e eletrônicos
Quando totalmente iluminado, os painéis solares rover gerar cerca de 140 watts para até quatro horas por dia marciano ( SOL). O rover precisa de cerca de 100 watts para dirigir. Seu sistema de energia inclui duas baterias recarregáveis As baterias de íon de lítio pesando 7,15 kg (16 libras) cada, que fornecem energia quando o sol não está brilhando, especialmente à noite. Ao longo do tempo, as baterias irão degradar e não será capaz de recarregar a plena capacidade.
Para comparação, o futuro Mars Science Laboratory está prevista para durar cerca de um ano marciano usando geradores termoelétricos de radioisótopos para alimentar seus vários instrumentos. Os painéis solares também estão sendo consideradas, mas RTGs proporcionar versatilidade para trabalhar em ambientes escuros e altas latitudes, onde a energia solar não é uma maneira eficiente para gerar energia.
Pensava-se que, até ao fim da missão 90-sol, a capacidade de os painéis solares para gerar energia provavelmente ser reduzida para cerca de 50 watts. Isto deveu-se a uma cobertura de pó previsto sobre os painéis solares, e a mudança de estação. Mas mais de três anos terrestres depois, fontes de alimentação dos rovers pairou entre 300 watt-hora e 900 watts-hora por dia, dependendo da cobertura de poeira. Eventos de limpeza (provavelmente vento) ter ocorrido mais frequentemente do que o esperado NASA, mantendo as matrizes relativamente livre de poeira e estender a vida da missão. Durante uma tempestade de poeira global de 2007 em Marte, ambos os rovers experimentado alguns dos mais baixos de energia da missão; Opportunity caiu para meros 128 watts-hora.
Os rovers executar um VxWorks sistema operativo incorporado numa 20 de radiações MHz RAD6000 CPU com 128 MB de DRAM com a detecção e correção de erros e 3 MB de EEPROM. Cada rover também tem 256 MB de memória flash. Para sobreviver durante todas as diferentes fases da missão, instrumentos vitais do Rover deve ficar dentro de uma temperatura de -40 ° C a 40 ° C (-40 ° F a 104 ° F). À noite, os rovers são aquecidos por oito unidades de aquecimento radioisótopo (RHU), que cada um gerar continuamente W de energia térmica a partir do decaimento de radioisótopos, juntamente com aquecedores elétricos que operam somente quando necessário. A sputtered ouro película e uma camada de sílica aerogel são utilizados para o isolamento.
Comunicação
O rover tem um baixo ganho e um antena de alto ganho. A antena de baixo ganho é omnidirecional, e transmite dados a uma taxa baixa para Profundos Space Network (DSN) antenas na Terra. A antena de alto ganho é direcional e orientável, e pode transmitir dados para a Terra a uma taxa maior.
As sondas também usar as antenas de baixo ganho para se comunicar com nave espacial em órbita de Marte, a Mars Odyssey e (antes de seu fracasso) do Mars Global Surveyor. As sondas transmitir dados de e para a Terra; a maioria dos dados para a Terra é retransmitida através Odyssey. Os benefícios da utilização das sondas orbitais são de que eles estão mais próximos dos rovers do que as antenas na Terra, e têm vista da terra por muito mais tempo do que os rovers. As sondas comunicar com as sondas usando antenas UHF, que têm alcance mais curto do que as antenas de baixo e alto ganho. Uma antena UHF está no rover e um está em uma pétala do lander para ajudar na obtenção de informações durante o evento crítico pouso.
As sondas têm um total de 18 câmeras, que produzem 1.024 pixels por 1.024 imagens de um pixel com 12 bits por pixel, mas a maioria das imagens são truncados para 8 bits por pixel. Eles são, em seguida, comprimida usando ICER antes de ser armazenado e enviado para a Terra. Navegação, em miniatura, e muitos outros tipos de imagens são comprimidos a cerca de 1 bits / pixel. Taxas de bits mais baixas (menos de 0,5 bit / pixel) são usados para certos comprimentos de onda de multi-cor imagens panorâmicas.
ICER é baseada em ondaletas, e foi projetado especificamente para aplicações de espaço profundo. Produz compressão progressiva, tanto sem perdas e com perdas, e incorpora um sistema de contenção de erro para limitar os efeitos de perda de dados no canal do espaço profundo. Ele supera o perdas compressor de imagem JPEG eo compressor de arroz sem perdas usado pela missão MPF.
Instrumentação científica

O rover tem vários instrumentos. Três são montados sobre um conjunto de:
- Câmara panorâmica (Pancam), para a determinação da textura, cor, mineralogia, e estrutura do terreno local.
- Navigation Camera (Navcam), que tem maior campo de visão, mas uma resolução mais baixa e é monocromática, para a navegação e condução.
- Um espelho para a emissão térmica Miniature Spectrometer (Mini-TES), que identifica rochas promissores e solos para análise mais aprofundada, e determina os processos que os formados. Foi construída por Arizona State University. Veja o principal Mini-TES artigo.
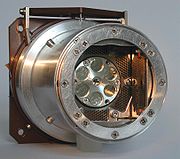
As câmeras são montadas 1,5 metros de altura sobre a Assembleia Mastro Pancam. Um motor gira a montagem horizontal de uma revolução inteira. Outro pontos das câmeras verticalmente, no máximo, em linha reta para cima ou para baixo. Um terceiro ponto motor do Mini-TES, até 30 ° acima do horizonte e 50 ° abaixo. O conjunto foi construído por Ball Aerospace & Technologies Corp., Boulder, Colorado, como foi o de Alto Ganho Antena Gimbal (HGAG).
Quatro câmeras monocromáticas (perigo Hazcams) são montados sobre o corpo do robô, dois em frente e dois atrás.
O dispositivo de implantação instrumento (IDD), também chamado de braço rover, detém o seguinte:
- Espectrômetro Mössbauer (MB) MIMOS II, desenvolvido pelo Dr. Gostar Klingelhöfer no Johannes Gutenberg University, em Mainz, Alemanha , é usado para close-up investigações sobre a mineralogia de rochas ferro-rolamento e solos.
- Partícula alfa X-Ray Spectrometer ( APXS), desenvolvido pelo Instituto Max Planck de Química, em Mainz, Alemanha , é usado para análise close-up das abundâncias de elementos que compõem as rochas e solos.
- Ímãs, para a recolha de partículas de pó magnético, desenvolvido por Grupo de Jens Martin Knudsen no Instituto Niels Bohr, Copenhagen . As partículas são analisadas pelo espectrómetro e Mossbauer Espectrómetro de raios-X para ajudar a determinar a proporção de partículas magnéticas a partículas não-magnéticas e a composição de minerais em pó em suspensão magnéticas e rochas que tenham sido triturados pela abrasão Ferramenta de rocha. Há também ímãs na parte da frente do rover, que são estudados extensivamente pelo espectrômetro Mössbauer.
- Imager microscópica (MI) para a obtenção de close-up, imagens de alta resolução das rochas e dos solos. Desenvolvimento foi liderado pela equipe de Ken Herkenhoff no USGS Programa de Pesquisa Astrogeology.
- Rocha ferramenta de abrasão (RAT), desenvolvido pela Abelha Robotics, para a remoção de superfícies rochosas e empoeiradas resistido e expondo o material fresco para exame por instrumentos de bordo.
O braço robótico é capaz de colocar instrumentos diretamente contra alvos de rocha e solo de interesse.
Nomeação de Spirit e Opportunity
Os rovers Spirit e Opportunity foram nomeados através de um concurso de redação do aluno. O vencedor foi por Sofi Collis, um estudante russo-americano de terceira série do Arizona.
Eu costumava viver em um orfanato. Estava escuro e frio e solitário. À noite, eu olhei para o céu brilhante e me senti melhor. Eu sonhei que eu pudesse voar para lá. Na América, eu posso fazer todos os meus sonhos se tornam realidade. Obrigado pela 'Spirit' e 'Opportunity'.
- Sofi Collis, idade 9
Antes disso, durante o desenvolvimento e construção dos rovers, eles eram conhecidos como MER-1 (Opportunity) e MER-2 (Espírito). Internamente NASA também usa a missão designações MER-A (Espírito) e MER-B (Opportunity) com base na ordem de aterragem em Marte (Espírito primeiro, em seguida, Opportunity).
SAP
A equipe da Nasa usa um aplicativo de software chamado de SAP a ver as imagens coletadas do rover, e planejar suas atividades diárias. Existe uma versão disponível ao público chamada Maestro.