

Mars Exploration Rover
Sabías ...
Voluntarios SOS ayudaron a elegir artículos e hicieron otros materiales currículo madres SOS cada mirada después de un una familia de niños apadrinados .

NASA Mars Exploration Rover (MER) Misión 's es una constante misión robótica de exploración de Marte , que comenzó en 2003 con el envío de dos rovers - Espíritu y Oportunidad - para explorar la superficie de Marte y la geología . La misión está encabezada por el Gerente de Proyecto Peter Theisinger de la NASA 's Jet Propulsion Laboratory de y investigador principal Steven Squyres, profesor de astronomía en La Universidad de Cornell.
El principal de los objetivos científicos de la misión es buscar y caracterizar una amplia variedad de rocas y suelos que contienen pistas sobre la actividad de agua en el pasado de Marte. La misión es parte del Programa de Exploración de Marte de la NASA que incluye tres módulos de aterrizaje exitosas anteriores: los dos Sondas Viking en 1976 y Pathfinder en 1997.
El costo total de la construcción, lanzamiento, recepción y operación de los rovers en la superficie de la misión primaria inicial de 90 días fue de aproximadamente US $ 820 millones. Dado que los rovers siguen funcionando cuatro años después del aterrizaje, financiamiento de la misión se ha extendido a "posiblemente hasta el 2009". En julio de 2007, las tormentas de polvo marcianas bloquean la luz del sol a los rovers y amenazaron a la capacidad de la nave para recoger la energía a través de su paneles solares, lo que provoca que los ingenieros temen que uno o ambos de ellos podría ser una discapacidad permanente; Sin embargo, las tormentas de polvo han levantado y ambos rovers han reanudado las operaciones.
En reconocimiento a la gran cantidad de información científica acumulada por ambos rovers, dos asteroides han sido nombrados en su honor: 37452 Espíritu y 39382 Opportunity.
Cronología
La MER-A rover, el Espíritu, se puso en marcha 10 de junio de 2003 a las 17:59 UTC, y MER-B, Oportunidad, en 7 de julio de 2003 a las 15:18 UTC. Spirit aterrizó en Cráter Gusev en 4 de enero de 2004 a las 04:35 Planta UTC. Opportunity aterrizó en el Meridiani Planum en el lado opuesto de Marte desde el Espíritu, en 25 de enero de 2004 05:05 Planta UTC. En la semana siguiente de aterrizaje del Spirit 's, el sitio web de la NASA registró 1,7 mil millones de hits y 34.6 terabytes de datos transferidos, eclipsando los registros establecidos por anteriores misiones de la NASA.

En 21 de enero de 2004 , el Red de Espacio Profundo perdió el contacto con el Espíritu, por razones pensado originalmente para ser relacionado con una tormenta eléctrica sobre Australia . El rover transmitió un mensaje sin datos, pero más tarde ese día se perdió otra sesión de comunicaciones con el Mars Global Surveyor. Al día siguiente, JPL logró recibir un pitido desde el rover, indicando que estaba en modo de fallo. El día 23, el equipo de vuelo logró hacer el envío rover. Se cree que el fallo que ha sido causado por un error en la década de los rover Subsistema de memoria flash. El rover no realizó ninguna actividad científica durante 10 días, mientras que los ingenieros actualizan su software y corrieron pruebas. El problema se corrigió a formatear la memoria flash del Espíritu y actualizar el software con una parche para evitar la sobrecarga de la memoria; Opportunity también se ha actualizado con el parche como precaución Espíritu volvió a operaciones científicos completos por. 5 de febrero. Esto ha sido hasta la fecha la anomalía más grave en la misión.
En 23 de marzo de 2004 , se celebró una conferencia de prensa anunciando "grandes descubrimientos" de pruebas de líquido pasado el agua en la superficie marciana. Una delegación de científicos mostró imágenes y datos que revelan un patrón estratificado y estratificación cruzada en las rocas del afloramiento dentro de un cráter en Meridiani Planum, lugar de aterrizaje de MER-B, Oportunidad, lo que sugiere que alguna vez hubo agua en la región. La distribución irregular de cloro y bromo también sugiere que el lugar que una vez fue la orilla de un mar salado, ahora se evaporó.
En 8 de abril de 2004 , la NASA anunció que estaba extendiendo la vida de la misión de los rovers de 3 a 8 meses. Inmediatamente se proporcionó financiación adicional de US $ 15 millones hasta septiembre, y 2,8 millones por mes para las operaciones continuas.
En 30 de abril de 2004 , el Opportunity llegó al Cráter Endurance, teniendo alrededor de 5 días para conducir los 200 metros.
En 22 de septiembre de 2004 , la NASA anunció que estaba extendiendo la vida de la misión de los rovers por otros 6 meses. Oportunidad era dejar el cráter Endurance, visite su escudo térmico descartado, y proceder a Cráter Victoria. Espíritu era tratar de subir a la cima de la Columbia Hills.
En 6 de abril de 2005 , con los dos rovers siguen funcionando bien, la NASA anunció otra extensión 18 meses de la misión de septiembre de 2006. Oportunidad era visitar el "Etched Terrain" y Espíritu iba a subir una pendiente rocosa hacia la parte superior Husband Hill.
En 21 de agosto de 2005 , Spirit llegó a la cima de Husband Hill después de 581 soles y un recorrido de 4,81 kilometros (2,99 millas).
Espíritu celebró su aniversario un marciano años (669 soles o 687 días terrestres) en 20 de noviembre de 2005 . Oportunidad celebró su aniversario el Diciembre 12. Al comienzo de la misión, se esperaba que los rovers no sobrevivirían mucho más de 90 días. Las colinas Columbia eran "sólo un sueño", según el conductor rover Chris Leger.
En 7 de febrero de 2006 , Spirit llegó a la formación de roca de medio punto conocido como Home Plate. Es un afloramiento de roca estratificada que desconcierta y excita los científicos. Se cree que sus rocas son depósitos volcánicos explosivos, aunque existen otras posibilidades, incluyendo los depósitos de impacto o / agua transmitidas por sedimentos viento.
En 13 de marzo de 2006 , de la rueda delantera derecha del Spirit dejó de funcionar mientras el vehículo se movía en sí a McCool Hill. Sus conductores intentaron arrastrar la rueda muerto detrás Espíritu, pero esto sólo trabajaron hasta llegar a una zona de arena intransitables en las faldas. Drivers dirigidos Espíritu para una característica inclinada más pequeño, llamado "canto Refugio Bajo", donde pasó el largo invierno marciano, a la espera para la primavera y el aumento de los niveles de energía solar adecuados para la conducción.
En 26 de septiembre de 2006 , vuelo espacial Ahora informó que la NASA ha extendido la misión de los dos rovers hasta septiembre de 2007. En 27 de septiembre de 2006 , el Opportunity llegó al borde de Cráter Victoria.
Espíritu había durado más de 1000 días marcianos explorar el cráter Gusev como de 25 de octubre de 2006 . Opportunity había durado más de 1000 días marcianos explorar Meridiani Planum como de 16 de noviembre de 2006 . A partir de 24 de enero de 2007 , los vehículos de exploración en Marte había durado más de tres años. (Aunque Opportunity aterrizó en 25 de enero del año 2004 fue un año bisiesto.)
En 6 de febrero de 2007 , el Opportunity se convirtió en la primera nave espacial que recorrer 10.000 metros - 10 kilometros - en la superficie de Marte.
En 28 de junio de 2007 , el Opportunity estaba a punto de entrar en el cráter Victoria desde su posición en el borde de Duck Bay., pero debido a las extensas tormentas de polvo, que se retrasó indefinidamente hasta que el polvo se había despejado y poder regresar a niveles seguros.
En 28 de agosto de 2007 , Spirit y Opportunity reanudó conducir después de atrincherarse durante furiosas tormentas de polvo que limitaban la energía solar a un nivel que casi causó el fracaso permanente de ambos rovers.
En 1 de octubre de 2007 , ambos Spirit y Opportunity entró en su quinto extensión de la misión que podría extender las operaciones en 2009, lo que permite que los vehículos exploradores han pasado cinco años explorando la superficie marciana, en espera de su supervivencia.
En 3 de enero de 2008 , el Espíritu entró en su cuarto año de exploración de Cráter Gusev.
Diseño de naves espaciales




El Mars Exploration Rover fue diseñado para ser guardado en la nariz de un Cohete Delta II. Cada nave consta de varios componentes:
- Rover: 185 kg (408 lb)
- Lander: 348 kg (767 libras)
- Carcasa / Paracaídas: 209 kg (461 libras)
- Escudo térmico: 78 kg (172 lb)
- Cruise Etapa: 193 kg (425 lb)
- Propulsor: 50 kg (110 lb)
Masa total es de 1.063 kg (2.343 libras).
Etapa de crucero
La etapa de crucero es el componente de la nave espacial que se utiliza para viajar desde la Tierra a Marte. Es muy similar a la Pathfinder Marte en diseño y es de aproximadamente 2,65 metros (8,7 pies) de diámetro y 1,6 m (5,2 pies) de altura, incluyendo el vehículo de entrada (véase más adelante).
La estructura primaria es de aluminio con un anillo exterior de las costillas cubierta por la paneles solares, que son alrededor de 2,65 m (8,7 pies) de diámetro. Dividido en cinco secciones, los paneles solares pueden proporcionar hasta 600 vatios de potencia cerca de la Tierra y 300 W en Marte.
Calentadores y aislamiento multicapa a mantener la electrónica "caliente". La sistema freón elimina el calor del hardware de la computadora de vuelo y las comunicaciones en el interior del vehículo por lo que no se recalienten. Sistemas de aviónica de Cruceros permiten la computadora de vuelo para interactuar con otros aparatos electrónicos como los sensores de sol, escáner estrella y calentadores.
La escáner de estrella (con un sistema de copia de seguridad) y sol sensor permitió la nave para conocer su orientación en el espacio mediante el análisis de la posición del Sol y de otras estrellas en relación a sí mismo. A veces, la nave podría estar ligeramente fuera de curso; esto era de esperar dado el viaje 500.000.000 kilometros (320 millones millas). Así navegantes planeadas hasta seis maniobras de corrección de trayectoria, junto con los controles de salud.
Para asegurarse de que la nave espacial llegó a Marte en el lugar adecuado para su aterrizaje, dos de peso ligero, tanques de aluminio forrado llevó unos 31 kg (aproximadamente 68 libras) de hidracina propelente. Junto con los sistemas de guía y control de crucero, el propulsor permitió navegantes para mantener la nave en curso. Burns y pulso disparos del propulsor permite tres tipos de maniobras:
- Una quemadura axial utiliza pares de propulsores para cambiar la velocidad de la nave espacial;
- Una quemadura lateral utiliza dos "grupos propulsores" (cuatro propulsores por grupo) para mover la nave espacial "de lado" a través de pulsos de segundos de largo;
- Modo de pulso de disparo utiliza pares propulsores acoplados para satélites maniobras de precesión (giros).
Comunicación
La nave espacial utiliza una alta frecuencia Banda X de radio la longitud de onda de comunicarse, lo que permitió menos energía y menor antenas que muchas naves mayores, que utiliza Banda S.
Navegantes envió comandos a través de dos antenas en la etapa de crucero: un crucero antena de baja ganancia montada en el interior del anillo interior, y una antena de media ganancia de cruceros en el anillo exterior. La antena de baja ganancia se utilizó cerca de la Tierra. Es omnidireccional, por lo que la potencia de transmisión que llegó a la Tierra cayó rápidamente al aumentar la distancia. A medida que la nave se acercó a Marte, el Sol y la Tierra se acercaron en el cielo como se ve desde la nave, por lo menos de energía llegó a la Tierra. Entonces, la nave espacial cambió a la antena de ganancia media, que dirige la misma cantidad de potencia de transmisión en un haz apretado hacia la Tierra.
Durante el vuelo, la nave estaba estabilizado por rotación con una velocidad de rotación de 2 rpm. Actualizaciones periódicas mantienen antenas apuntando hacia la Tierra y los paneles solares hacia Sun.
Aeroshell
El aeroshell formó una cubierta protectora para el módulo de aterrizaje durante el viaje de siete meses a Marte. Junto con el módulo de aterrizaje y el rover, que constituía el "vehículo de entrada". Su principal objetivo era proteger el módulo de aterrizaje y el rover interior del intenso calentamiento de entrada en la atmósfera marciana. Se basó en los diseños del Mars Pathfinder y Marte de Viking.
Regiones
El aeroshell estaba hecha de dos partes principales: una escudo térmico y una carcasa trasera. El escudo térmico era plana y de color marrón, y se protege el módulo de aterrizaje y el rover del intenso calor de la entrada en la atmósfera marciana y actuó como el primer aerobrake para la nave espacial. La carcasa trasera era grande, y pintado de blanco en forma de cono. Se llevó el paracaídas y varios componentes utilizados en las etapas posteriores de entrada, descenso y aterrizaje, incluyendo:
- Un paracaídas (replegada en la parte superior de la carcasa trasera);
- La electrónica de nueva carcasa y las baterías que disparan fuera artificios pirotécnicos como las nueces de separación, cohetes y mortero paracaídas;
- Una Unidad de Litton LN-200 Medición Inercial (IMU), que monitorea y reporta la orientación de la carcasa trasera ya que las oscilaciones en el marco del paracaídas;
- Tres grandes motores de cohetes sólidos llamados cohetes RAD (Rocket Descent Asistida), proporcionando cada uno alrededor de una tonelada de fuerza (10 kilonewtons) por más de 2 segundos;
- Tres pequeños cohetes sólido llamado TIRS (montados de manera que apuntan horizontalmente los lados de la carcasa trasera) que proporcionan un pequeño tiro horizontal a la carcasa trasera para ayudar a orientar la carcasa trasera más vertical durante el principal quemadura cohete RAD.
Composición
Construido por la Lockheed Martin Astronautics Co. en Denver, Colorado, el aeroshell está hecho de una estructura de nido de abeja de aluminio intercalada entre hojas de las caras de grafito-epoxi. El exterior de la aeroshell está cubierto con una capa de fenólico de nido de abeja. Este nido de abeja se llena con una el material ablativo (también denominado "ablador"), que disipa el calor generado por la fricción atmosférica.
El ablador en sí es una mezcla única de corcho de madera , aglutinante y muchas pequeñas de sílice esferas de vidrio. Fue inventado por los escudos térmicos volados en las misiones de aterrizaje Viking a Marte. Una tecnología similar se utilizó en el primero de EE.UU. misiones espaciales tripuladas Mercurio, Géminis y Apolo. Fue especialmente formulado para reaccionar químicamente con la atmósfera marciana durante la entrada y llevar a calentar, dejando una estela de gas caliente detrás del vehículo. El vehículo se desaceleró desde 19000 km / h (aproximadamente 12.000 mph) a unos 1600 km / h (1000 mph) en aproximadamente un minuto, produciendo alrededor de 60 m / s² (6 g) de la aceleración en el módulo de aterrizaje y el rover.
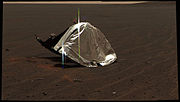
La carcasa trasera y el escudo de calor están hechos de los mismos materiales, pero el escudo térmico tiene un grueso medio pulgadas (12,7 mm) de la capa de material antidesgaste. Además, en lugar de ser pintado, la carcasa trasera se cubrió con una aluminizado muy delgada PET película manta para protegerlo del frío del espacio profundo. La manta vaporizado durante la entrada atmosférica de Marte.
Paracaídas

El paracaídas ayudó a frenar la nave durante la entrada, descenso y aterrizaje. Se encuentra en la carcasa trasera.
Diseño
El diseño 2003 del paracaídas fue parte de un esfuerzo a largo plazo el desarrollo de tecnología paracaídas Marte y se basa en los diseños y la experiencia de las misiones Viking y Pathfinder. El paracaídas para esta misión es 40% más grande que la Pathfinder es porque la mayor carga para el Mars Exploration Rover es de 80 a 85 kilonewtons (kN) o 18.000 a 19.000 lbf (85 kN) cuando el paracaídas se infla completamente. En comparación, las cargas de inflación de Pathfinder fueron aproximadamente 35 kN (8.000 lbf). El paracaídas fue diseñado y construido en South Windsor, Connecticut Pioneer Aeroespacial ( sitio web), la compañía que también diseñó el paracaídas para el La misión Stardust.
Composición
El paracaídas se hace de dos telas duraderas y ligeras: poliéster y nylon. Una brida de triple hecha de Kevlar conecta el paracaídas a la carcasa trasera.
La cantidad de espacio disponible en la nave espacial para el paracaídas es tan pequeña que el paracaídas tenía que ser la presión lleno. Antes del lanzamiento, un equipo bien doblado las 48 líneas de suspensión, tres líneas de herradura, y el paracaídas. El equipo de paracaídas cargado el paracaídas en una estructura especial que luego se aplica un peso pesado para el paquete paracaídas varias veces. Antes de colocar el paracaídas en la carcasa trasera, el paracaídas se establece en calor esterilizarlo.
Los sistemas conectados

Zylon Cabezadas: Después de que el paracaídas se desplegó a una altitud de unos 10 km (6 millas) sobre la superficie, el escudo térmico fue puesto en libertad utilizando 6 tuercas de separación y push-off manantiales. El módulo de aterrizaje y luego separado de la carcasa trasera y "rappel" por una cinta de metal en un sistema de freno centrífugo integrado en uno de los pétalos del lander. El lento descenso por la cinta de metal colocado el módulo de aterrizaje en posición al final de otra brida (correa), hecho de una cerca de 20 m (65 pies) de largo trenzado Zylon.
Zylon es un material de fibra avanzado similar al Kevlar que se cose en un patrón de banda (como material de cordón) para hacerlo más fuerte. La brida Zylon proporciona espacio para el despliegue del airbag, distancia de la corriente de escape del motor cohete de combustible sólido, y una mayor estabilidad. La brida incorpora un arnés eléctrico que permite el disparo de los cohetes sólidos de la carcasa trasera, así como proporciona datos de la unidad de medición inercial carcasa trasera (que mide la velocidad y la inclinación de la nave espacial) a la computadora de vuelo en el rover.
Rocket descenso asistido (RAD): motores. Debido a que la densidad de la atmósfera de Marte es menos del 1% de la de la Tierra, el paracaídas por sí sola no podría ralentizar el Mars Exploration Rover suficiente para garantizar una velocidad de aterrizaje bajo seguro. El descenso nave fue asistido por cohetes que llevaron a la nave espacial a un muerto parada 10-15 m (30-50 pies) sobre la superficie marciana.
Unidad altímetro radar: Un radar unidad de altímetro se utilizó para determinar la distancia a la superficie marciana. La antena del radar está montado en una de las esquinas inferiores de la tetraedro Lander. Cuando la medición radar mostraba el módulo de aterrizaje fue la distancia correcta por encima de la superficie, la brida Zylon se cortó, liberando el módulo de aterrizaje del paracaídas y carcasa trasera de modo que era libre y claro para el aterrizaje. Los datos de radar también permitió a la secuencia de tiempo de inflado del airbag y RAD backshell cohete de fuego.
Airbags

Las bolsas de aire utilizado en la misión Mars Exploration Rover son del mismo tipo que Mars Pathfinder utilizada en 1997. Tuvieron que ser lo suficientemente fuerte como para amortiguar la nave si aterrizó en las rocas o terrenos accidentados y permitir que rebote a través de la superficie de Marte a velocidades de autopista después de aterrizar. Los airbags tenían que ser inflado segundo antes de la toma y se desinfla una vez de forma segura en el suelo.
Las bolsas de aire se hicieron de Vectran, como los de Pathfinder. Vectran tiene casi el doble de la fuerza de otros materiales sintéticos, como el Kevlar, y funciona mejor en temperaturas frías. Seis 100 denier (10 mg / m) capas de Vectran protegidos uno o dos vejigas interiores de Vectran en 200 denier (20 mg / m). El uso de 100 denier (10 mg / m) deja más tejido en las capas externas donde se necesita, porque hay más hilos en el tejido.
Cada rover utilizó cuatro airbags con seis lóbulos cada una, todas las cuales fueron conectados. Conexión era importante, ya que ayudó a abatir algunas de las fuerzas de desembarco, manteniendo el sistema de bolsas flexibles y sensibles a presión sobre el suelo. Las bolsas de aire no se fijan directamente al móvil, pero se llevaron a cabo a la misma por medio de cuerdas que atraviesan la estructura de bolsa. Las cuerdas dio la forma de bolsas, lo que hace más fácil la inflación. Durante el vuelo, las bolsas se almacenen junto con tres generadores de gas que se utilizan para la inflación.
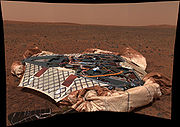
Lander

El módulo de aterrizaje nave espacial es una "cáscara" protectora que alberga el rover y la protege, junto con las bolsas de aire, de las fuerzas de impacto.
El módulo de aterrizaje es un tetraedro forma cuyos lados abrir como pétalos. Es fuerte y ligero, y está hecho de vigas y láminas. Las vigas consisten en capas de fibra de grafito teje en una tela que es más ligero que el aluminio y más rígido que el acero . Accesorios de titanio se pegan y se sitúan sobre las vigas para permitir que sea atornillado juntos. El rover se llevó a cabo en el interior del módulo de aterrizaje por pernos y tuercas especiales que se publicaron después de aterrizar con pequeños explosivos.
Enderezamiento
Después de que el módulo de aterrizaje se detuvo rebotando y rodando por el suelo, que se detuvo en la base del tetraedro o uno de sus lados. Entonces, los lados abiertos para hacer la base horizontal y el rover en posición vertical. Los lados están conectados a la base mediante bisagras, cada uno de los cuales tiene un motor lo suficientemente fuerte como para levantar el módulo de aterrizaje. El módulo de aterrizaje más rover tiene una masa de alrededor de 533 kilogramos (1.175 libras). El rover solo pesa alrededor de 185 kg (408 libras). La gravedad en Marte es aproximadamente el 38% de la de la Tierra, por lo que el motor no necesita ser tan poderosa como lo haría en la Tierra.
El rover contiene acelerómetros para detectar en qué dirección es hacia abajo (hacia la superficie de Marte) mediante la medición de la fuerza de gravedad. El equipo rover entonces mandó el pétalo lander correcta para abrir para colocar el vehículo en posición vertical. Una vez que la base de pétalos estaba abajo y el rover estaba en posición vertical, se abrieron los otros dos pétalos.
Los pétalos abiertos inicialmente a una posición igualmente plana, por lo que todos los lados del módulo de aterrizaje eran recto y nivelado. Los motores pétalos son lo suficientemente fuertes para que si dos de los pétalos vienen a descansar en las rocas, la base con el rover se mantiene en su lugar como un puente por encima del suelo. La base se mantenga en un nivel incluso con la altura de los pétalos que descansan sobre rocas, haciendo una superficie plana recta a lo largo de la longitud de la abierta, aplanado Lander. El equipo de vuelo en la Tierra podría entonces enviar comandos al rover para ajustar los pétalos para crear un camino seguro para el vehículo para eliminar el módulo de aterrizaje y sobre la superficie marciana, sin dejar a una roca empinada.
Traslado de la carga útil en Marte
El movimiento del rover de la sonda se llama la fase de salida de la misión. El rover debe evitar tener sus ruedas atrapados en el material de la bolsa de aire o caerse de una inclinación agudo. Para ayudar a esto, un sistema de retracción en los pétalos arrastra lentamente las bolsas de aire hacia el módulo de aterrizaje antes de que los pétalos abiertos. Rampas pequeñas en el ventilador pétalos a cabo para llenar espacios entre los pétalos. Cubren un terreno desigual, obstáculos de roca, y el material de la bolsa de aire, y forman un área circular de la que el rover pueda emprender la marcha en más direcciones. También reducen el paso que el rover debe bajar. Ellos son apodados "alas de murciélago", y están hechos de tela Vectran.
Unas tres horas fueron asignadas para retraer las bolsas de aire y desplegar los pétalos del lander.
Diseño de Rover

Los rovers son seis ruedas robots, con energía solar que se destacan 1,5 m (4,9 pies) de alto, 2,3 m (7,5 pies) de ancho y 1,6 m (5,2 pies) de largo. Pesan 180 kg (400 libras), 35 kg (80 lb) de los cuales es el sistema de ruedas y suspensión.
Sistema de manejo
Cada vehículo tiene seis ruedas montadas en un sistema de suspensión rocker-bogie que asegura ruedas permanecen en el suelo durante la conducción en terrenos irregulares. El diseño reduce el rango de movimiento del cuerpo rover a la mitad, y permite que el rover para ir por encima de obstáculos oa través de agujeros que son más que un diámetro de la rueda (250 mm o 10 pulgadas) de tamaño. Cada rueda tiene también tacos, proporcionando agarre para escalar en la arena suave y trepar por las rocas.
Cada rueda tiene su propio motor. Los dos delanteros y dos ruedas traseras disponen motores de dirección individuales. Esto permite que el vehículo gire en su lugar, una revolución completa, y al efecto y curva, haciendo giros arqueadas. El rover está diseñado para soportar una inclinación de 45 grados en cualquier dirección sin volcar. Sin embargo, el rover se programa a través de sus "límites de protección de falla" en su software de evitación de riesgos para evitar superar inclinaciones de 30 grados.
Cada vehículo puede girar una de sus ruedas delanteras en lugar de moler profundamente en el terreno. Es permanecer inmóvil mientras que la rueda de excavación está girando.
El rover tiene una velocidad máxima en terreno plano y rígido de 50 mm / s (2 in / s). Sin embargo, su velocidad media es de 10 mm / s, ya que su software de evitación de riesgos hace que deje cada 10 segundos durante 20 segundos para observar y conocer el terreno que ha impulsado en.
Los sistemas de energía y electrónicos
Cuando esté totalmente iluminada, los paneles solares del rover generan alrededor de 140 vatios para un máximo de cuatro horas por día marciano ( sol). El rover necesita alrededor de 100 vatios para conducir. Su sistema de alimentación incluye dos baterías recargables Las baterías de iones de litio con un peso de 7,15 kg (16 libras) cada uno, que proporcionan energía cuando el sol no brilla, especialmente por la noche. Con el tiempo, las baterías se degradan y no será capaz de recargar a plena capacidad.
Para la comparación, el futuro Se espera Laboratorio de Ciencia de Marte de una duración aproximada de un año marciano usando generadores termoeléctricos de radioisótopos para alimentar sus muchos instrumentos. Los paneles solares también se están considerando, pero RTG proporcionan versatilidad para trabajar en ambientes oscuros y altas latitudes donde la energía solar no es una manera eficiente de generar energía.
Se pensó que por el final de la misión 90-sol, la capacidad de los paneles solares para generar energía probablemente se reduciría a aproximadamente 50 vatios. Esto se debió a la cobertura de polvo previsto en los paneles solares, y el cambio de temporada. Pero más de tres años de la Tierra más tarde, fuentes de alimentación de los rovers rondaban entre 300 vatios-hora y 900 vatios-hora por día, dependiendo de la cobertura de polvo. Eventos de limpieza (probablemente el viento) han ocurrido con más frecuencia que la NASA espera que, manteniendo las matrices relativamente libre de polvo y extender la vida de la misión. Durante una tormenta global de polvo en Marte 2007, ambos rovers experimentaron algo de la potencia más baja de la misión; Opportunity cayó a apenas 128 vatios-hora.
Los rovers corren un VxWorks sistema operativo embebido en una resistentes a la radiación 20 MHz RAD6000 CPU con 128 MB de DRAM con detección y corrección de errores y 3 MB de EEPROM. Cada rover también tiene 256 MB de memoria flash. Para sobrevivir durante todas las diversas fases de la misión, instrumentos vitales del móvil deberán permanecer dentro de una temperatura de -40 ° C a 40 ° C (-40 ° F a 104 ° F). Por la noche los rovers son calentadas por ocho los calefactores de radioisótopos (RHU) que cada generan continuamente 1 W de energía térmica a partir de la decadencia de radioisótopos, junto con los calentadores eléctricos que operan sólo cuando sea necesario. Un pulverizado oro película y una capa de sílice aerogel se utilizan para el aislamiento.
Comunicación
El rover tiene un baja ganancia y un antena de alta ganancia. La antena de baja ganancia es omnidireccional, y transmite datos a una velocidad baja para Space Network (DSN) antenas profundos de la Tierra. La antena de alta ganancia es direccional y orientable, y puede transmitir datos a la Tierra a un ritmo mayor.
Los rovers también utilizan las antenas de baja ganancia para comunicarse con la nave espacial en órbita alrededor de Marte, el Mars Odyssey y (antes de su fracaso) el Mars Global Surveyor. Los orbitadores de retransmisión de datos desde y hacia la Tierra; la mayoría de los datos a la Tierra se transmiten a través de Odyssey. Los beneficios de utilizar los orbitadores son que están más cerca de los rovers que las antenas en la Tierra, y tienen vista de la Tierra desde mucho antes que los rovers. Los orbitadores se comunican con los rovers que utilizan antenas UHF, que tienen un menor alcance que las antenas de baja y alta ganancia. Una antena de UHF está en el rover y uno está en un pétalo del lander para ayudar en la obtención de la información durante el evento de aterrizaje crítico.
Los vehículos tienen un total de 18 cámaras, que producen 1.024 píxeles por imágenes de 1024 píxeles en 12 bits por píxel, pero la mayoría de las imágenes se truncan a 8 bits por píxel. A continuación, se comprimen utilizando ICER antes de ser almacenado y enviado a la Tierra. Navegación, miniatura, y muchos otros tipos de imagen se comprimen a aproximadamente 1 bit / pixel. Las tasas de bits más bajas (menos de 0,5 bit / píxel) se utilizan para ciertas longitudes de onda de imágenes panorámicas multi-color.
ICER se basa en ondas, y fue diseñado específicamente para aplicaciones de espacio profundo. Produce compresión progresiva, tanto sin pérdidas y con pérdidas, e incorpora un esquema de error contención para limitar los efectos de la pérdida de datos en el canal del espacio profundo. Supera a la pérdida JPEG compresor de imágenes y el compresor Arroz sin pérdida utilizado por la misión MPF.
Instrumentación científica

El rover tiene varios instrumentos. Tres están montados en una asamblea:
- Cámara panorámica (Pancam), para determinar la textura, el color, mineralogía, y la estructura del terreno local.
- Cámara de Navegación (NavCam), que tiene un mayor campo de visión, pero menor resolución y es monocromática, para la navegación y la conducción.
- Un espejo para la emisión termal en miniatura Espectrómetro (Mini-TES), que identifica las rocas y suelos prometedoras para un examen más detallado, y determina los procesos que los formaron. Fue construido por Universidad del Estado de Arizona. Ver el principal Artículo Mini-TES.
Las cámaras están montadas 1,5 metros de altura en la Asamblea Mástil Pancam. Un motor hace girar el conjunto horizontalmente toda una revolución. Otro de los puntos de la cámara en posición vertical, a lo más recta hacia arriba o abajo. Un tercer punto de motor del Mini-TES, hasta 30 ° sobre el horizonte y 50 ° por debajo. El conjunto fue construido por Bola Aerospace & Technologies Corp., Boulder, Colorado, al igual que la antena de alta ganancia del cardán (HGAG).
Cuatro cámaras de peligro monocromáticas ( Hazcams) están montados en el cuerpo del vehículo, dos delante y dos detrás.
El dispositivo de despliegue de instrumentos (IDD), también llamado el brazo móvil, sostiene lo siguiente:
- Espectrómetro Mössbauer (MB) MIMOS II, desarrollado por el Dr. Gostar Klingelhöfer en la Johannes Gutenberg de la Universidad de Mainz, Alemania , se utiliza para el primer plano las investigaciones de la mineralogía de las rocas que contienen hierro y suelos.
- Partículas Alfa Espectrómetro de Rayos X ( APXS), desarrollado por el Instituto Max Planck de Química en Mainz, Alemania , se utiliza para el análisis de cerca de las abundancias de los elementos que componen las rocas y suelos.
- Imanes, para recoger partículas de polvo magnético, desarrollado por El grupo de Jens Martin Knudsen en el Niels Bohr Institute, Copenhague . Las partículas son analizadas por el Espectrómetro Mössbauer y Espectrómetro de rayos X para ayudar a determinar la proporción de partículas magnéticas para partículas no magnéticas y la composición de los minerales magnéticos en polvo y rocas en el aire que han sido molidas por la herramienta de abrasión. También hay imanes en la parte delantera del vehículo, que se ha estudiado ampliamente por el espectrómetro Mössbauer.
- Imager microscópica (MI) para la obtención de primer plano, imágenes de alta resolución de las rocas y suelos. Desarrollo fue dirigido por el equipo de Ken Herkenhoff en el USGS Programa de Investigación Astrogeología.
- Herramienta Roca abrasión (RAT), desarrollado por Abeja robótica, para la eliminación de las superficies rocosas y polvorientas resistido y la exposición de material fresco para su examen por los instrumentos de a bordo.
El brazo robótico es capaz de colocar los instrumentos directamente en contra de los objetivos de roca y suelo de interés.
Nombramiento de Spirit y Opportunity
Los rovers Spirit y Opportunity fueron nombrados a través de un concurso de redacción de los estudiantes. La obra ganadora fue por Sofi Collis, de tercer grado del estudiante ruso-estadounidense de Arizona.
Yo vivía en un orfanato. Estaba oscuro y frío y solitario. Por la noche, miré hacia el cielo brillante y me sentí mejor. Soñé que podía volar allí. En Estados Unidos, Puedo hacer todos mis sueños se hagan realidad. Gracias por el 'Spirit' y el 'Opportunity'.
- Sofi Collis, edad 9
Antes de esto, durante el desarrollo y la construcción de los vehículos de exploración, se les conocía como MER-1 (Oportunidad) y MER-2 (Espíritu). Internamente NASA también utiliza la misión designaciones MER-A (Espíritu) y MER-B (Oportunidades) en base a la orden de aterrizar en Marte (Spirit primero luego de Oportunidades).
SAP
El equipo de la NASA utiliza una aplicación de software llamada SAP para ver las imágenes recogidas del rover, y planificar sus actividades diarias. Hay una versión disponible para el público llamado Maestro.