

Autostereogram
Antecedentes de las escuelas de Wikipedia
Esta selección Escuelas fue originalmente elegido por SOS para las escuelas en el mundo en desarrollo que no tienen acceso a Internet. Está disponible como una descarga intranet. patrocinio SOS Niño es cool!
Un autostereogram es solo una imagen estereograma (SIS), diseñado para crear la ilusión visual de un período de tres dimensional (3D) escena de una imagen de dos dimensiones en el cerebro humano. A fin de que percibir formas en 3D en estos autostereograms, el cerebro debe superar la coordinación normalmente automática entre enfoque y convergencia.
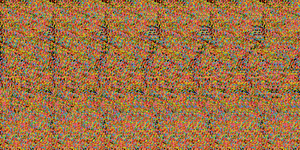
El tipo más simple de autostereogram consiste en patrones de repetición horizontal y se conoce como un fondo de pantalla autostereogram . Cuando se ve con la convergencia adecuada, los patrones de repetición parecen flotar por encima o por debajo del fondo. La Libros ojo mágico cuentan con otro tipo de autostereogram llama autostereogram puntos aleatorios . Uno de tales autostereogram se ilustra arriba a la derecha. En este tipo de autostereogram, cada píxel de la imagen se calcula a partir de una tira de patrón y un mapa de profundidad. Por lo general, una escena 3D oculto emerge cuando la imagen se ve con la convergencia correcta.
Autostereograms son similares a los estereogramas normales, excepto que son vistos sin estereoscopio. Un estereoscopio presenta imágenes en 2D del mismo objeto desde ángulos ligeramente diferentes para el ojo izquierdo y el ojo derecho, permitiendo que el cerebro para reconstruir el objeto original a través disparidad binocular. Con una autostereogram, el cerebro recibe la repetición de patrones en 2D de ambos ojos, pero no coincide correctamente. Marida dos patrones adyacentes en un objeto virtual basado en ángulos de paralaje equivocadas, poniendo así el objeto virtual en un profundidad diferente de la de la imagen autostereogram.
Hay dos formas en que un autostereogram puede vieron: pared de ojos y bizcos. La mayoría de autostereograms (incluidos los de este artículo) se han diseñado para ser visto en un solo sentido, que es generalmente ojos en pared. Visualización de la pared de ojos requiere que los dos ojos adoptan una relativamente ángulo paralelo, mientras que la visión bizca requiere una relativamente ángulo convergente.
Historia
En 1838, el científico británico Charles Wheatstone publicó una explicación de estereopsis (percepción de profundidad binocular) surge de las diferencias en las posiciones horizontales de imágenes en los dos ojos. Apoyó su explicación al mostrar imágenes con diferencias tan horizontales, estereogramas, por separado para los ojos izquierdo y derecho a través de un estereoscopio Inventó basa en espejos. Cuando las personas vieron estos, fotos planas bidimensionales, experimentaron la ilusión de profundidad tridimensional.
Entre 1849 y 1850, David Brewster, un científico escocés, mejoró el estereoscopio Wheatstone utilizando lentes en lugar de espejos, reduciendo así el tamaño del artilugio.
Brewster descubrió también el "efecto papel pintado". Se dio cuenta de que mirando a los patrones repetidos en fondos de pantalla podría engañar al cerebro para que los correspondientes pares de ellos como procedentes de un mismo objeto virtual en un plano virtual detrás de las paredes. Esta es la base del estilo del papel pintado "autostereograms" (también conocidos como los estereogramas de una sola imagen).
En 1959, Bela Julesz, un científico de la visión, psicólogo y MacArthur Fellow, inventó el estereograma de puntos aleatorios, mientras trabajaba en los Laboratorios Bell en el reconocimiento de objetos camuflados de fotografías aéreas tomadas por aviones espías. En ese momento, muchos científicos visión todavía pensaban que percepción de la profundidad se produjo en el propio ojo, mientras que ahora se sabe que es un proceso neurológico complejo. Julesz utiliza una computadora para crear un par estéreo de imágenes aleatorias de puntos que, cuando se ve en un estereoscopio, causó el cerebro para ver formas 3D. Esto demostró que la percepción de profundidad es un proceso neurológico.
En 1979, Christopher Tyler de Smith-Kettlewell Instituto, un estudiante de Julesz y psicofísico visual, combinó las teorías detrás de una sola imagen estereogramas wallpaper y estereogramas al azar-punto para crear el primer "autostereogram aleatoria de puntos" (también conocido como una sola imagen estereograma azar-punto) . Este tipo de autostereogram permite a una persona ver formas 3D a partir de una sola imagen 2D sin la ayuda de equipos ópticos.
Cómo funcionan
Fondos de escritorio simple

Estereopsis o visión estéreo, es la mezcla visual de dos similares pero no idénticos imágenes en una, con resultado percepción visual de solidez y profundidad. En el cerebro humano, los resultados estereopsis de complejos mecanismos que forman una impresión tridimensional, haciendo coincidir cada punto (o conjunto de puntos) en vista de un ojo con el punto equivalente (o conjunto de puntos) en vista del otro ojo. Uso disparidad binocular, el cerebro obtiene la posición de los puntos 'en el eje z de otra manera inescrutable (profundidad).
Cuando el cerebro se presenta con un patrón de repetición como fondos de escritorio, tiene dificultad a juego las opiniones de los dos ojos 'con precisión. Al observar un horizontalmente la repetición del modelo, pero la convergencia de los dos ojos en un punto detrás del patrón, es posible engañar al cerebro en búsqueda de un elemento del patrón, como se ha visto por el ojo izquierdo, con otro elemento (mirando similar), al lado de la primera, como se ve por el ojo derecho. Con la típica visión ojos en pared , esto da la ilusión de un avión que lleva el mismo patrón, pero situado detrás de la pared real. La distancia a la que este plano se encuentra detrás de la pared sólo depende de la separación entre elementos idénticos.
Autostereograms utilizan esta dependencia de la profundidad en el espaciamiento para crear imágenes tridimensionales. Si, sobre una cierta área de la imagen, el patrón se repite a distancias más pequeñas, esa área aparecerá más cerca que el plano de fondo. Si la distancia de repeticiones es más largo sobre una cierta área, entonces esa zona aparecerá más distante (como un agujero en el plano).

Las personas que nunca han sido capaces de percibir formas 3D ocultos dentro de una autostereogram les resulta difícil entender comentarios como, "la imagen 3D se acaba de salir del fondo, después usted mira fijamente la imagen lo suficientemente larga", o "los objetos en 3D se acaba de emerger del fondo ". Ayuda a ilustrar cómo 3D imágenes "emergen" desde el fondo de la perspectiva de un segundo espectador. Si los objetos virtuales en 3D reconstruidas por el cerebro del espectador autostereogram eran objetos reales, un segundo espectador observando la escena desde el lado vería que flotan en el aire la imagen de fondo por encima de estos objetos.
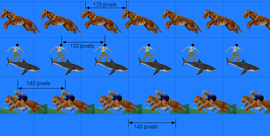
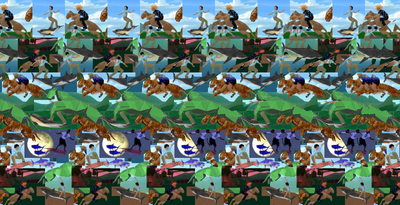
Los efectos 3D en el ejemplo autostereogram se crean mediante la repetición de los iconos jinete tigre cada 140 píxeles en el plano de fondo, el jinete tiburón iconos de cada 130 píxeles en el segundo plano, y los iconos de tigre cada 120 píxeles en el plano más elevado. Cuanto más cerca de un conjunto de iconos se embalan horizontalmente, la más alta que se elevan desde el plano de fondo. Esta distancia de repetición se refiere como la profundidad o valor del eje z de un patrón particular en el autostereogram. El valor de profundidad también se conoce como Valor Z-buffer.
 |  |
El cerebro es capaz de casi instantáneamente a juego cientos de patrones repetidos a intervalos diferentes para recrear la información de profundidad correcta para cada patrón. Un autostereogram puede contener unos 50 tigres de diferentes tamaños, que se repiten en diferentes intervalos contra un complejo, fondo repetido. Sin embargo, a pesar de la disposición caótica aparente de patrones, el cerebro es capaz de colocar todos los iconos de tigre en su profundidad adecuada.
 |  |
Mapas de profundidad
 | ||||
 |  | |||
Autostereograms donde los patrones en una fila en particular se repiten horizontalmente con la misma separación se pueden leer bien bizco o ojos en pared . En tales autostereograms, ambos tipos de lectura producirán interpretación profundidad similar, con la excepción de que la lectura bizco invierte la profundidad (imágenes que una vez que se le salieron ahora están pulsado).
Sin embargo, iconos en una fila no necesitan ser dispuestos a intervalos idénticos. Un autostereogram con diferentes intervalos entre los iconos a través de una fila presenta estos iconos en diferentes planos de profundidad para el espectador. La profundidad de cada icono se calcula a partir de la distancia entre él y su vecino de la izquierda. Estos tipos de autostereograms están diseñados para ser leído de una sola manera, ya sea bizco o ojos en pared. Todos autostereograms en este artículo se codifican para la visualización de la pared de ojos, a menos que se indique expresamente lo contrario. Un autostereogram codificado para su visualización ojos en pared producirá patrones 3D incoherentes cuando se ve bizco. La mayoría de las imágenes del ojo mágico también están diseñadas para su visualización ojos en pared.
El siguiente autostereogram ojos en pared codifica 3 aviones a través del eje x. El plano de fondo es en el lado izquierdo de la imagen. El plano más alto se muestra en el lado derecho de la imagen. Hay un plano medio estrecha en el centro del eje x. Comenzando con un plano de fondo donde los iconos están espaciados a 140 píxeles, se puede plantear un icono en particular por cambio de un cierto número de píxeles a la izquierda. Por ejemplo, el plano medio es creado por desplazamiento de un icono 10 píxeles a la izquierda, creando una separación que consta de 130 píxeles. El cerebro no se basa en iconos inteligibles que representan objetos o conceptos. En este autostereogram, los patrones se vuelven más y más pequeño hasta el eje Y, hasta que parecen puntos aleatorios. El cerebro es todavía capaz de igualar estos patrones de puntos aleatorios.
La relación distancia entre cualquier pixel y su contraparte en el patrón equivalente a la izquierda se puede expresar en un mapa de profundidad. Un mapa de profundidad es simplemente una imagen en escala de grises que representa la distancia entre un píxel y su contraparte izquierda utilizando un valor de escala de grises entre blanco y negro. Por convención, más cerca que la distancia es, más brillante el color se vuelve.
El uso de este convenio, un mapa de profundidad de escala de grises para la autostereogram anterior se puede crear con turnos de negro, gris y blanco que representan de 0 píxeles, 10 píxeles y 20 píxeles, respectivamente. Un mapa de profundidad es la clave para la creación de autostereograms azar-punto.
Random-dot
 |
Un programa de software puede tardar una imagen patrón de acompañamiento para producir un mapa de profundidad y autostereogram. El programa de azulejos la imagen del patrón horizontalmente para cubrir un área cuyo tamaño es idéntico al mapa de profundidad. Conceptualmente, en cada píxel de la imagen de salida, el programa busca el valor de escala de grises del píxel equivalente en la imagen del mapa de profundidad, y utiliza este valor para determinar la cantidad de desplazamiento horizontal requerido para el píxel.
Una forma de lograr esto es hacer que el programa de exploración de todas las líneas de la imagen de salida píxel por píxel de izquierda a derecha. Siembra el primero de la serie de píxeles en una fila de la imagen patrón. Entonces consulte el mapa de profundidad para recuperar los valores de desplazamiento adecuadas para píxeles posteriores. Para cada píxel, se resta el cambio de la anchura de la imagen del patrón para llegar a un intervalo de repetición. Se utiliza este intervalo de repetición para buscar el color del píxel homólogo a la izquierda y utiliza su propio color como el color de la nueva pixel.
 |  |
A diferencia de los timones de profundidad sencillas creadas por autostereograms papel pintado simples, los cambios sutiles en la separación especificada por el mapa de profundidad pueden crear la ilusión de suave gradientes en la distancia. Esto es posible porque el mapa de profundidad de escala de grises Permite que los píxeles individuales que se colocan en uno de 2 timones de profundidad n, donde n es el número de bits utilizados por cada píxel en el mapa de profundidad. En la práctica, el número total de timones de profundidad se determina por el número de píxeles utilizados para la anchura de la imagen del patrón. Cada valor de escala de grises debe traducirse en espacio de píxeles con el fin de cambiar los píxeles de la autostereogram final. Como resultado, el número de planos de profundidad debe ser menor que el ancho del patrón.

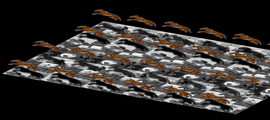
El gradiente afinado requiere una imagen patrón más complejo que el estándar del papel pintado repetición de patrones, por lo que normalmente se utiliza un modelo que consiste en puntos aleatorios repetidos. Cuando el autostereogram es vista con técnica correcta visualización, una escena 3D oculto emerge. Autostereograms de esta forma se conocen como Random Dot autostereograms.
Degradados suaves también se puede lograr con un patrón inteligible, en el supuesto de que el patrón es bastante complejo y no tiene manchas grandes, horizontal, monótonas. Un área grande pintado con colores monótona y sin cambio en matiz y brillo no se presta a cambio de pixel, como resultado del cambio horizontal es idéntica a la parche original. El siguiente mapa de profundidad de un tiburón con degradado suave produce un autostereogram perfectamente legible, aunque la imagen 2D contiene pequeñas áreas monótonas; el cerebro es capaz de reconocer estas pequeñas lagunas y rellenar los espacios en blanco. Mientras, los patrones repetidos inteligibles se utilizan en lugar de puntos al azar, este tipo de autostereogram sigue siendo conocido por muchos como un Random Dot autostereogram, porque se crea utilizando el mismo proceso.
 |  |
Animado
Cuando una serie de autostereograms se muestra uno tras otro, de la misma manera imágenes en movimiento se muestran, el cerebro percibe una animada autostereogram. Si todos autostereograms en la animación se producen utilizando el mismo patrón de fondo, a menudo es posible ver los contornos borrosos de las partes del objeto 3D en movimiento en la imagen autostereogram 2D sin visión ojos en pared; los píxeles constantemente cambiantes del objeto en movimiento se pueden distinguir claramente de la estática de fondo plano. Para eliminar este efecto secundario, autostereograms animados menudo utilizan fondo cambiantes a fin de ocultar las partes móviles.
Cuando un patrón repetitivo regular se ve en una Monitor CRT como si se tratara de un autostereogram fondo de pantalla, por lo general es posible ver las ondas de profundidad. Esto también se puede ver en el fondo a una, autostereogram azar-punto estático. Estas son causadas por los cambios de lado en la imagen debido a pequeños cambios en la sensibilidad de deflexión (linealidad) de la exploración de línea, que luego se convierten en interpretadas como profundidad. Este efecto es especialmente evidente en el borde izquierdo de la pantalla en la que la velocidad de exploración todavía se está asentando después de la fase de retorno. Este efecto se ausente durante una TFT LCD.
Esta técnica fue utilizada como uno de los posibles métodos de visualización 3-D en el Serie Magic Carpet.
Mecanismos para la visión
Existe mucha consejos acerca de ver la imagen en tres dimensiones destinado en un autostereogram. Si bien algunas personas pueden simplemente ver la imagen en 3D en un autostereogram, otros deben aprender a entrenar a sus ojos para desacoplar la convergencia ocular de la lente de enfoque.
No todas las personas pueden ver el 3D ilusión en autostereograms. Debido autostereograms se construye a partir de visión estéreo, las personas con una variedad de impedimentos visuales, incluso aquellos que afectan a un solo ojo, no son capaces de ver las imágenes en tres dimensiones.
Las personas con ambliopía (también conocida como ojo perezoso) son incapaces de ver las imágenes en tres dimensiones. Los niños con pobres o disfuncionales vista durante un período crítico en la niñez pueden crecer stereoblind, ya que sus cerebros no son estimulados por imágenes estéreo durante el período crítico. Si el problema tal visión no se corrige en la primera infancia, que el daño sea permanente y el adulto nunca será capaz de ver autostereograms. Se estima que alrededor de 1% a 5% de la población está afectada por la ambliopía.
Percepción 3D
Resultados percepción de la profundidad de muchas pistas visuales monoculares y binoculares. Para objetos relativamente cerca de los ojos, la visión binocular juega un papel importante en la percepción de la profundidad. La visión binocular permite al cerebro para crear una única Imagen ciclópeo y para fijar un nivel de profundidad a cada punto de la imagen ciclópeo.
 |  |  |
El cerebro utiliza coordenadas de desplazamiento (también conocido como paralaje) de objetos apareados para identificar la profundidad de estos objetos. El nivel de profundidad de cada punto en la imagen combinada puede ser representado por un píxel de escala de grises en una imagen 2D, para el beneficio del lector. Cuanto más cerca de un punto aparece al cerebro, más brillante que está pintado. Por lo tanto, la forma del cerebro percibe profundidad utilizando visión binocular puede ser capturada por un mapa de profundidad (imagen ciclópeo) pintó basa en coordinar turno.


El ojo funciona como una cámara fotográfica. Tiene un ajustable iris que puede abrir (o cerrar) para permitir que más (o menos) la luz entre en el ojo. Al igual que con cualquier cámara, excepto cámaras estenopeicas, necesita enfocar los rayos de luz que entran a través del iris (abertura en una cámara) de manera que se centran en un solo punto en la retina con el fin de producir una imagen nítida. El ojo logra este objetivo mediante el ajuste de una lente detrás de la córnea para refractar la luz adecuadamente.
Estéreo-visión basada en paralaje permite al cerebro para calcular profundidades de los objetos en relación con el punto de convergencia. Es el ángulo de convergencia que da el cerebro el valor de profundidad de referencia absoluta para el punto de convergencia de la cual profundidades absolutos de todos los demás objetos pueden ser inferidas.
Percepción 3D simulado
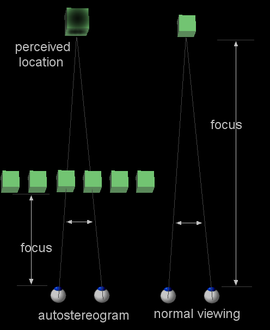
Los ojos se centran normalmente y convergen a la misma distancia en un proceso conocido como convergencia acomodativa. Es decir, al mirar un objeto lejano, el cerebro se aplana automáticamente los lentes y gira los dos globos oculares para la visión ojos en pared. Es posible entrenar el cerebro para separar estas dos operaciones. Esta desvinculación no tiene ningún propósito útil en la vida cotidiana, ya que evita que el cerebro interprete objetos de una manera coherente. Para ver una imagen hecha por el hombre, tales como autostereogram donde los patrones se repiten horizontalmente, sin embargo, el desacoplamiento de centrarse de convergencia es crucial.
Al centrarse las lentes en una autostereogram cercano donde se repiten los patrones y por la convergencia de los ojos en un punto de la imagen autostereogram detrás lejano, se puede engañar al cerebro para ver imágenes en 3D. Si los patrones recibidos por los dos ojos son lo suficientemente similares, el cerebro se tenga en cuenta estos dos patrones de un partido y los tratan como procedentes de un mismo objeto imaginario. Este tipo de visualización se conoce como la visualización de la pared de ojos, debido a que los globos oculares adoptan una convergencia ojos en pared en un plano distante, aunque la imagen autostereogram es en realidad más cerca de los ojos. Debido a que los dos globos oculares convergen en un plano más lejos, la localización percibida del objeto imaginario está detrás de la autostereogram. El objeto imaginario también parece más grande que los patrones en la autostereogram debido escorzo.
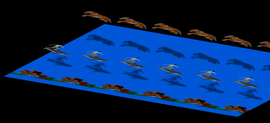
La siguiente autostereogram muestra 3 filas de patrones repetidos. Cada patrón se repite a un intervalo diferente para colocarlo en un plano diferente profundidad. Las dos líneas que no se repite se pueden utilizar para verificar la visualización ojos en pared correcta. Cuando el autostereogram es interpretada correctamente por el cerebro mediante la visualización ojos en pared, y uno se queda mirando a los delfines en el centro del campo visual, el cerebro debe ver dos conjuntos de líneas parpadeantes, como resultado de rivalidad binocular.
 | 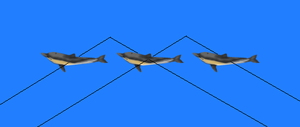 |

Si bien hay 6 patrones de delfines en el autostereogram, el cerebro debe ver 7 delfines "aparentes" en el plano de la autostereogram. Este es un efecto secundario de la emparejamiento de patrones similares por el cerebro. Hay 5 pares de patrones de delfines en esta imagen. Esto permite que el cerebro para crear 5 delfines aparentes. El patrón más a la izquierda y el patrón más a la derecha por sí mismos no tienen pareja, pero el cerebro trata de asimilar estos dos patrones sobre el plano de profundidad establecida de delfines adyacentes a pesar de la rivalidad binocular. Como resultado, hay 7 delfines aparentes, con la más a la izquierda y los más a la derecha que aparecen con un ligero parpadeo, no muy diferente a los dos conjuntos de líneas parpadeantes observaron cuando uno mira a los delfines aparente cuarto.
Debido a escorzo, la diferencia en la convergencia necesaria para ver patrones repetidos en diferentes planos hace que el cerebro atribuir diferentes tamaños para patrones con tamaños 2D idénticos. En el autostereogram de 3 filas de cubos, mientras que todos los cubos tienen las mismas dimensiones físicas 2D, los que están en la fila superior aparece más grande, porque se perciben como más lejos que los cubos en la segunda y tercera filas.
Viendo técnicas
Al igual que con una cámara fotográfica, es más fácil para que el foco del ojo en un objeto cuando hay luz ambiental intensa. Con una iluminación intensa, el ojo puede constreñir la iris, sin embargo, permitir que la luz suficiente para llegar a la retina. Cuanto más se asemeja a un ojo cámara estenopeica, menos depende de centrándose a través de la lente . En otras palabras, se reduce el grado de desacoplamiento entre el enfoque y la convergencia necesaria para visualizar una autostereogram. Esto pone menos presión en el cerebro. Por lo tanto, puede ser más fácil para los espectadores autostereogram por primera vez a "ver" sus primeras imágenes en 3D si intentan esta hazaña con iluminación brillante.
Control de la convergencia es importante en ser capaz de ver imágenes en 3D. Por lo tanto, puede ayudar a concentrarse en convergente / divergente de los dos ojos para cambiar las imágenes que llegan a los dos ojos, en lugar de tratar de ver una imagen clara y enfocada. Aunque el objetivo ajusta reflexivamente para producir imágenes claras y enfocadas, el control voluntario sobre este proceso es posible. Los suplentes del espectador en vez entre convergentes y divergentes de los dos ojos, en el proceso de ver "imágenes dobles" típicamente ven cuando uno es borracho o no en estado de embriaguez. Con el tiempo el cerebro coincidirá con éxito un par de patrones reportados por los dos ojos y se centrará en ella determinado grado de convergencia. El cerebro también se ajustará lentes de ojo para obtener una imagen clara del par coincidente. Una vez hecho esto, las imágenes alrededor de los patrones coincidentes se convierten rápidamente en claro como el cerebro coincide con patrones adicionales utilizando aproximadamente el mismo grado de convergencia.
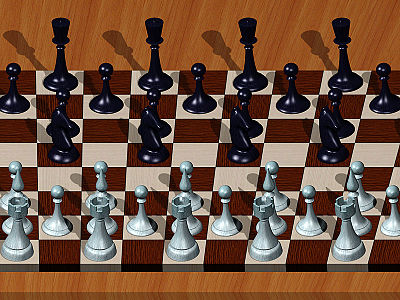
Cuando uno se desplaza la atención desde un avión profundidad a otro (por ejemplo, de la fila superior del tablero de ajedrez de la fila inferior), los dos ojos necesitan ajustar su convergencia para que coincida con el nuevo intervalo de repetición de patrones. Si el nivel de cambio en la convergencia es demasiado alta durante este turno, a veces el cerebro puede perder el desacoplamiento duramente ganado entre el enfoque y la convergencia. Para un espectador por primera vez, por lo tanto, puede ser más fácil ver la autostereogram, si los dos ojos ensayan el ejercicio de convergencia en una autostereogram donde la profundidad de los patrones a través de una fila en particular permanece constante.
En una autostereogram de puntos aleatorios, la imagen 3D se suele muestra en el medio de la autostereogram contra un plano de fondo de profundidad (ver el autostereogram tiburón). Puede ayudar a establecer primero la convergencia adecuada por mirando a la parte superior o la parte inferior de la autostereogram, donde los patrones se repiten por lo general en un intervalo constante. Una vez que los bloqueos cerebrales sobre el plano de fondo de profundidad, tiene un grado de convergencia de referencia de la que a continuación puede igualar patrones en diferentes niveles de profundidad en el centro de la imagen.
La mayoría de autostereograms, incluidos los de este artículo, se han diseñado para divergente visión (ojos en pared). Una forma de ayudar al cerebro concentrado en la divergencia en vez de centrarse es mantener la imagen frente a la cara, con la nariz tocando la imagen. Con la imagen tan cerca de sus ojos, la mayoría de la gente no puede concentrarse en la imagen. El cerebro puede dejar de tratar de mover los músculos del ojo con el fin de obtener una imagen clara. Si uno tira lentamente de nuevo la imagen de la cara, aunque absteniéndose de enfoque o los ojos de rotación, en algún momento el cerebro se bloquea en un par de patrones de cuando la distancia entre ellos que coincida con el grado de convergencia actual de los dos globos oculares.
Otra forma es la mirada en un objeto detrás de la imagen en un intento de establecer la divergencia adecuada, manteniendo parte de la vista fija en la imagen para convencer al cerebro a concentrarse en la imagen. Un método modificado tiene la mirada espectador a su reflejo en la superficie brillante de la imagen, que el cerebro percibe como siendo situado dos veces tan lejos como la propia imagen. Esto puede ayudar a persuadir al cerebro a adoptar la divergencia requerida mientras se centra en la imagen cerca.
Para autostereograms cruzadas de ojos, un enfoque diferente hay que tener. El espectador podrá celebrar un dedo entre sus ojos y lo mueve lentamente hacia la imagen, manteniendo su foco en el dedo, en todo momento, hasta que él se centra correctamente en el lugar entre él y la imagen que le permitirá ver la ilusión.
Terminología
- Estereograma
- Fue originalmente utilizado para describir un par de imágenes en 2D utilizados en estereoscopio para presentar una imagen 3D a los espectadores. El término se utiliza a menudo como sinónimo de autostereogram o autostereogram puntos aleatorios. Pero el Dr. Tyler, inventor de la autostereogram, se refiere constantemente a estereogramas de una sola imagen como autostereograms para distinguirlas de otras formas de estereogramas.
- Random Dot Estereograma (RDS)
- Random Dot Estereograma, o RDS, fue descrito originalmente un par de imágenes en 2D que muestran puntos aleatorios que, cuando se ve con un estereoscopio, producen una imagen en 3D. El término se utiliza a menudo como sinónimo de autostereogram puntos aleatorios.
- Estereograma de una única imagen (SIS)
- Una única imagen Estereograma (SIS) es un sinónimo de autostereogram. SIS difiere de la mayoría estereogramas en su uso de una sola imagen 2D en lugar de un par estéreo. Cuando la imagen 2D solo se ve con la convergencia ocular adecuada, que hace que el cerebro para fusionar diferentes patrones percibidos por los dos ojos en una imagen virtual en 3D sin la ayuda de ningún equipo óptico.
- Wallpaper autostereogram
- Es una imagen 2D donde los patrones se repiten en varios intervalos para subir o bajar de cada patrón percibido ubicación 3D en relación a un plano de fondo virtual.
- Autostereogram Random-dot
- También se conoce como una única imagen Random Dot Estereograma (SIRDS). Este término también se refiere a autostereograms donde se utilizan patrones inteligibles en lugar de puntos aleatorios.
- Una única imagen Texto aleatorio Estereograma (sirts)
- Una única imagen Texto aleatorio Estereograma o sirts, es una alternativa a SIRDS utilizando aleatoria normalmente ASCII de texto en lugar de puntos para producir una forma 3D de Arte ASCII.